运动控制系统:闭环直流调速
第1章复习笔记:可控直流电源、V-M/PWM系统、调速指标、转速负反馈、PI无静差。
views
| comments
本文是根据课程课件与课堂记录整理的复习笔记;原始 PDF 已在“运动控制系统:原始课件”页面提供。页码以本地 PDF 页码为准。
第1章:闭环控制的直流调速系统#
1.0 课件页码与考试重点#
| 重要度 | 知识点 | 课件页码 | 复习要求 |
|---|---|---|---|
| ★★★ | 直流调速方法与调压调速主线 | 第1章 pp. 4-11 | 会由 推出三种调速方式 |
| ★★☆ | G-M、V-M、PWM 三类可控直流电源 | 第1章 pp. 12-29 | 会比较结构、优缺点和应用场合 |
| ★★★ | V-M 系统主要问题 | 第1章 pp. 30-52 | 掌握整流电压、脉动电流、连续/断续机械特性 |
| ★★★ | PWM 变换器 | 第1章 pp. 63-113 | 会写占空比、平均电压、双极性PWM关系 |
| ★★★ | 调速范围、静差率、额定速降 | 第1章 pp. 118-127 | 高概率计算题 |
| ★★★ | 转速负反馈闭环静特性 | 第1章 pp. 128-152 | 会解释闭环为什么减小速降、扩大调速范围 |
| ★★☆ | 电流截止负反馈 | 第1章 pp. 169-186 | 会说明限流作用和分段静特性 |
| ★★★ | PI 调节器与无静差调速 | 第1章 pp. 244-283 | 会解释 P 有静差、PI 无静差 |
1.1 本章主线#
本章从“用什么电源调直流电机”开始,逐步进入“如何用反馈改善调速性能”。
- 直流电机调速以调压调速为主。
- 可控直流电源有G-M、V-M、PWM三类。
- 开环调速难以同时满足调速范围和静差率要求。
- 转速负反馈能减小速降,但比例控制仍有静差。
- 电流截止负反馈用于限流保护。
- PI调节器通过积分作用实现稳态无静差。
1.2 直流电机调速方程#
电枢电压方程:
反电动势:
转速方程:
由此推出三种调速:
| 调速方法 | 控制量 | 特点 |
|---|---|---|
| 调压调速 | 改变 | 机械特性近似平行移动,自动控制主方法 |
| 调阻调速 | 改变 | 机械特性变软,损耗大 |
| 调磁调速 | 改变 | 基速以上弱磁升速,转矩能力下降 |
1.3 可控直流电源#
| 电源类型 | 名称 | 工作方式 | 特点 |
|---|---|---|---|
| G-M系统 | 旋转变流机组 | 交流电机拖动直流发电机,再给直流电机供电 | 可四象限,体积大、效率低、维护多 |
| V-M系统 | 晶闸管-电动机系统 | 用可控整流器改变直流平均电压 | 大容量常用,但有谐波、无功、断续电流等问题 |
| PWM系统 | 直流斩波/PWM变换器 | 用开关器件调节平均电压 | 响应快、效率高、低速性能好 |
1.4 V-M系统重点#
1.4.1 整流电压#
晶闸管可控整流通过改变触发角 改变整流电压。理想空载整流电压:
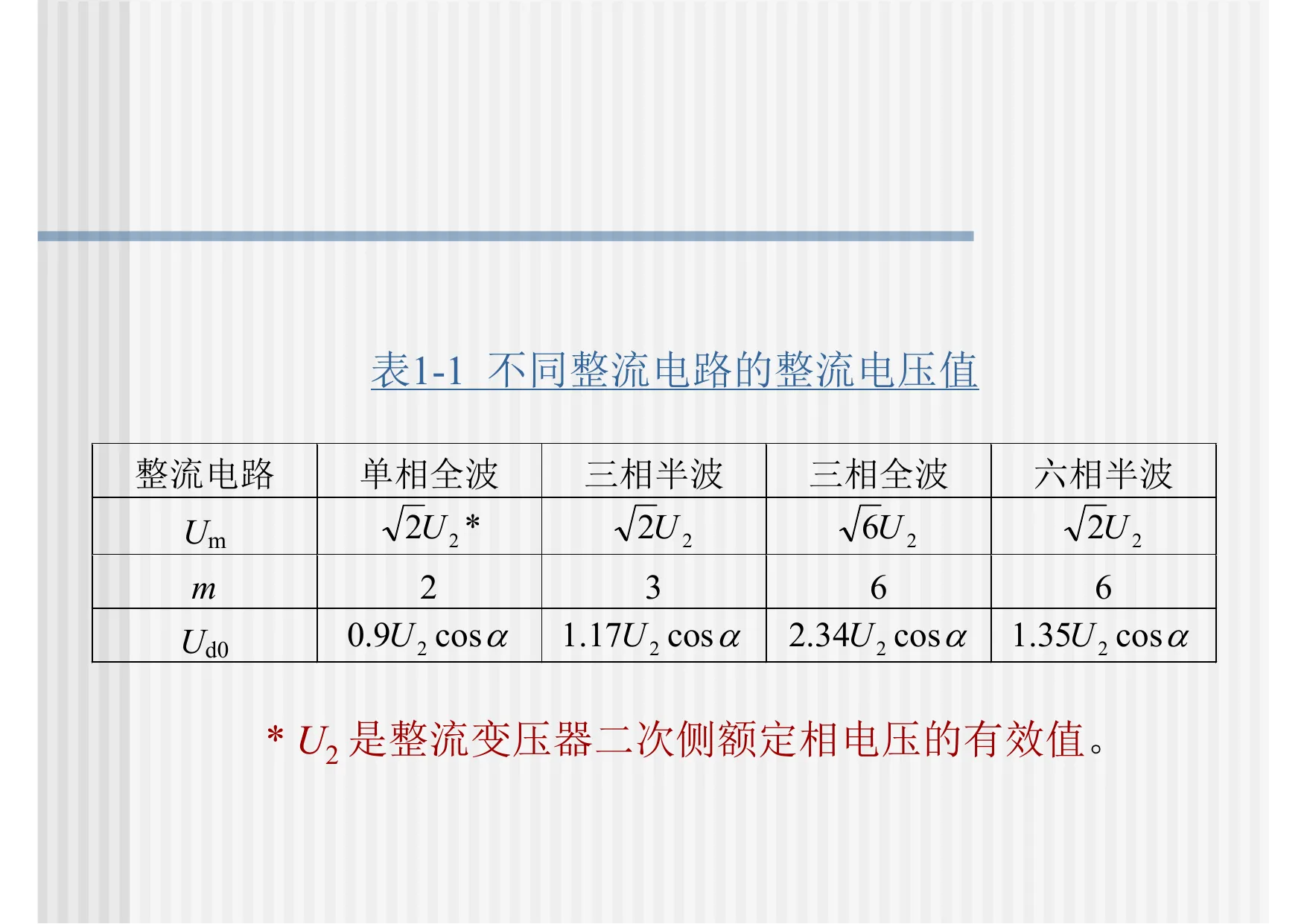
一般 脉波整流电路:
不同整流电路的 形式见表1-1,这张表用于判断不同整流电路的平均电压表达式。
考虑等效压降:
1.4.2 V-M系统问题#
V-M系统主要问题:
- 晶闸管单向导电,可逆运行复杂。
- 对过电压、过电流、、 敏感。
- 相控整流带来谐波和无功功率。
- 输出电流可能脉动甚至断续。
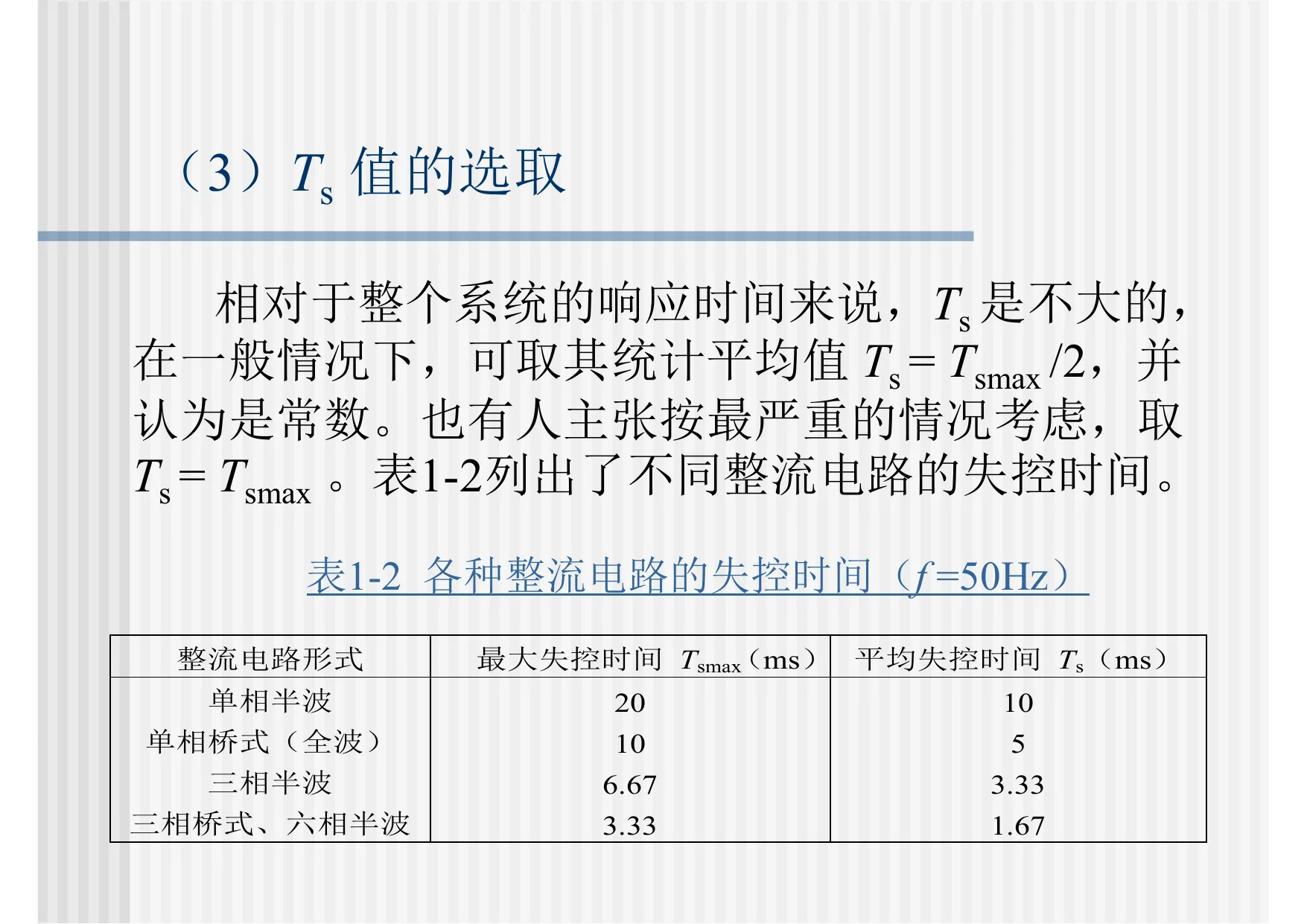
- 存在失控时间,动态响应受限制。
失控时间见表1-2,它说明不同整流电路触发后到输出响应之间存在延迟。
1.4.3 V-M机械特性#
电流连续时,V-M系统机械特性近似为线性:
电流断续时,机械特性非线性且变软,低速性能变差。因此 V-M 系统常需要平波电抗器来改善电流连续性。
1.5 PWM系统重点#
1.5.1 不可逆PWM#
占空比:
平均输出电压:
1.5.2 二象限不可逆PWM#
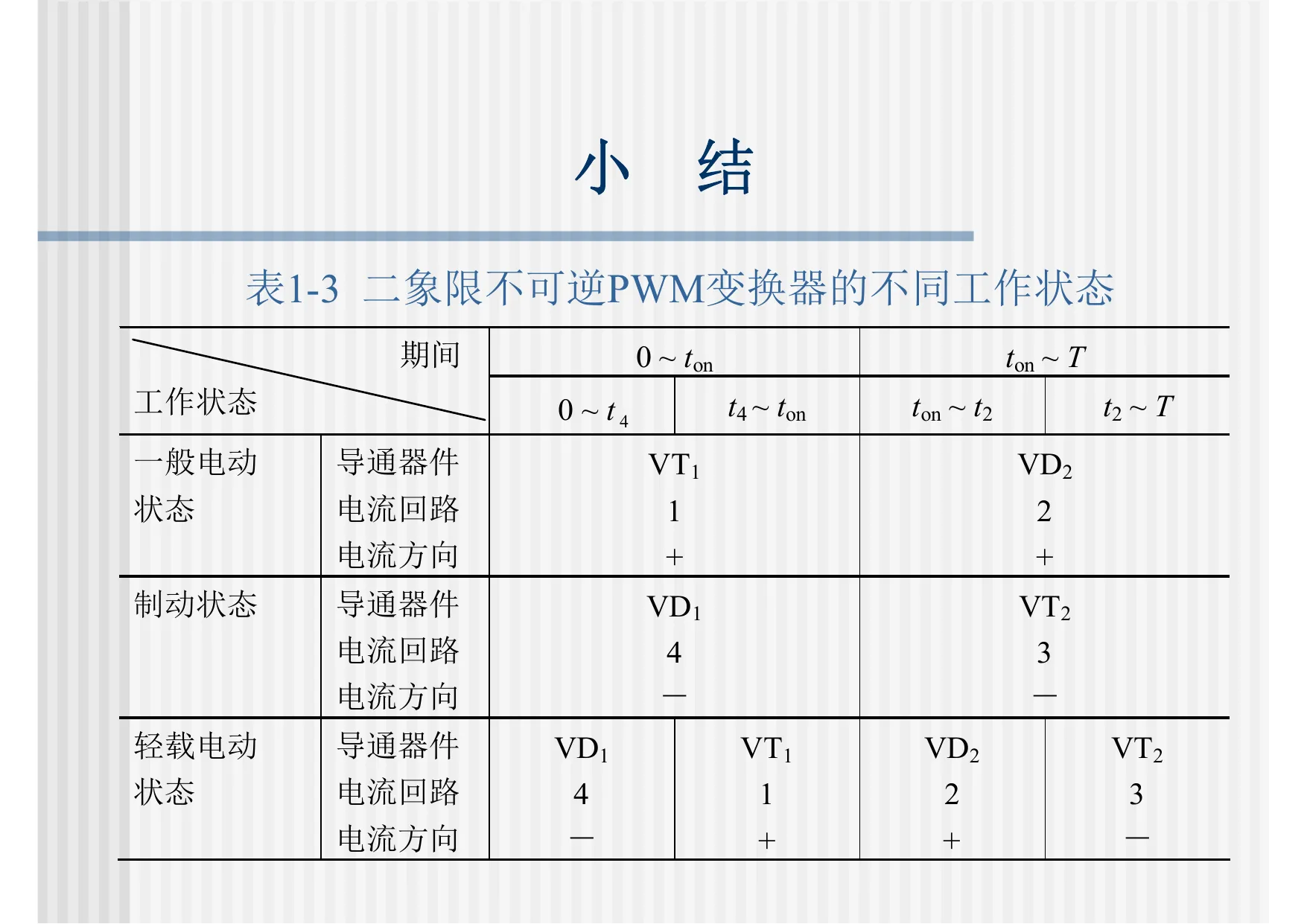
二象限不可逆PWM通过双管交替工作提供制动电流通路。表1-3是理解“电动状态、制动状态、电流续流路径”的关键表。
1.5.3 桥式可逆PWM#
双极性桥式可逆PWM中:
当 时 ;当 时电压为正;当 时电压为负。
PWM系统优点:
- 主电路简单,功率器件少。
- 开关频率高,电流连续性好。
- 低速性能好,调速范围宽。
- 动态响应快。
- 器件工作在开关状态,效率高。
1.6 静态性能指标#
1.6.1 调速范围#
1.6.2 静差率#
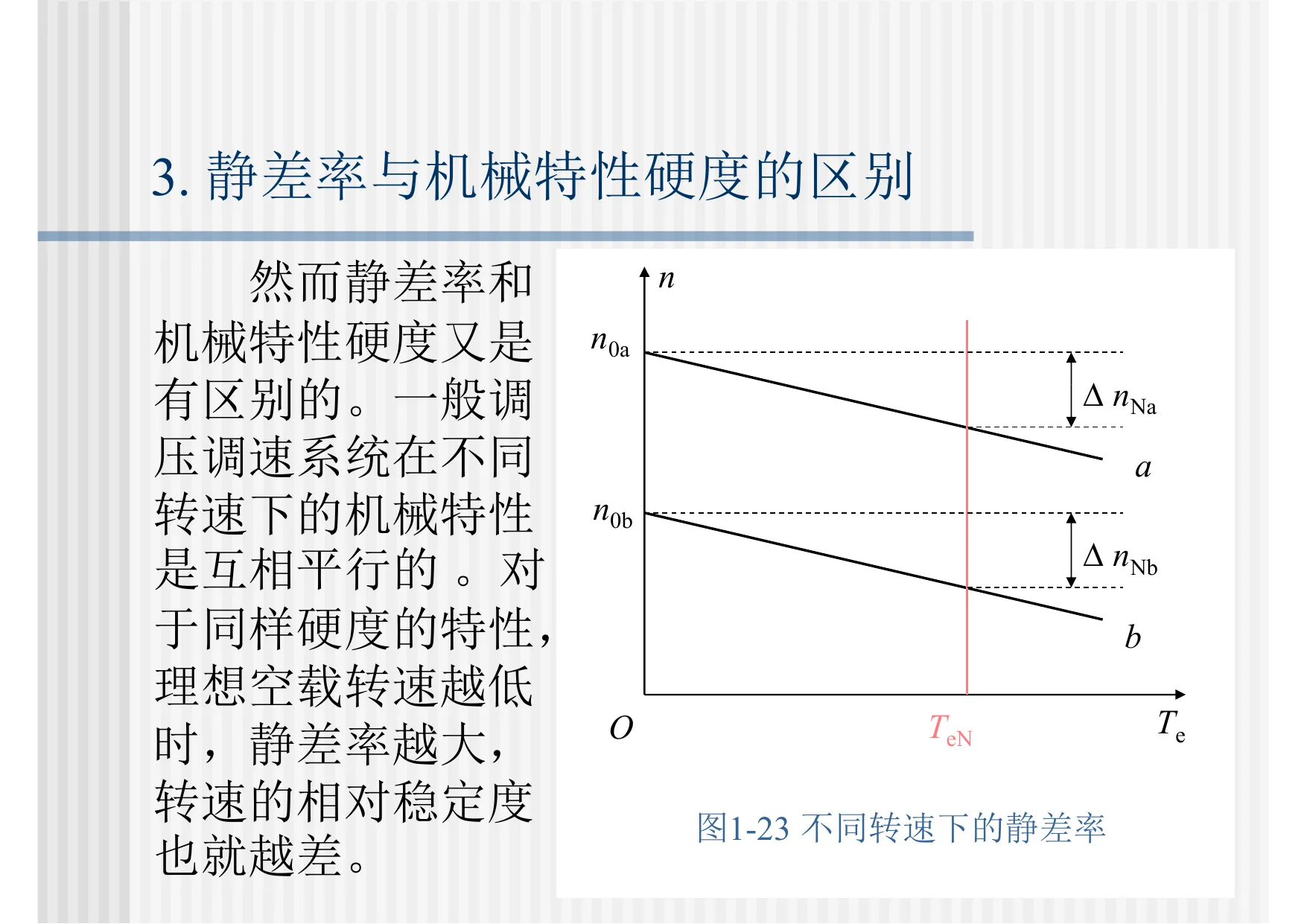
静差率按最低速考核。同样的额定速降,在低速时相对误差更大。
1.6.3 调速范围、静差率、额定速降#
最低速理想空载转速:
最低速额定负载转速:
若 ,则:
结论:
- 静差率要求越小,允许调速范围越小。
- 额定速降越大,允许调速范围越小。
- 要扩大调速范围,必须提高机械特性硬度。
1.7 转速负反馈闭环调速#
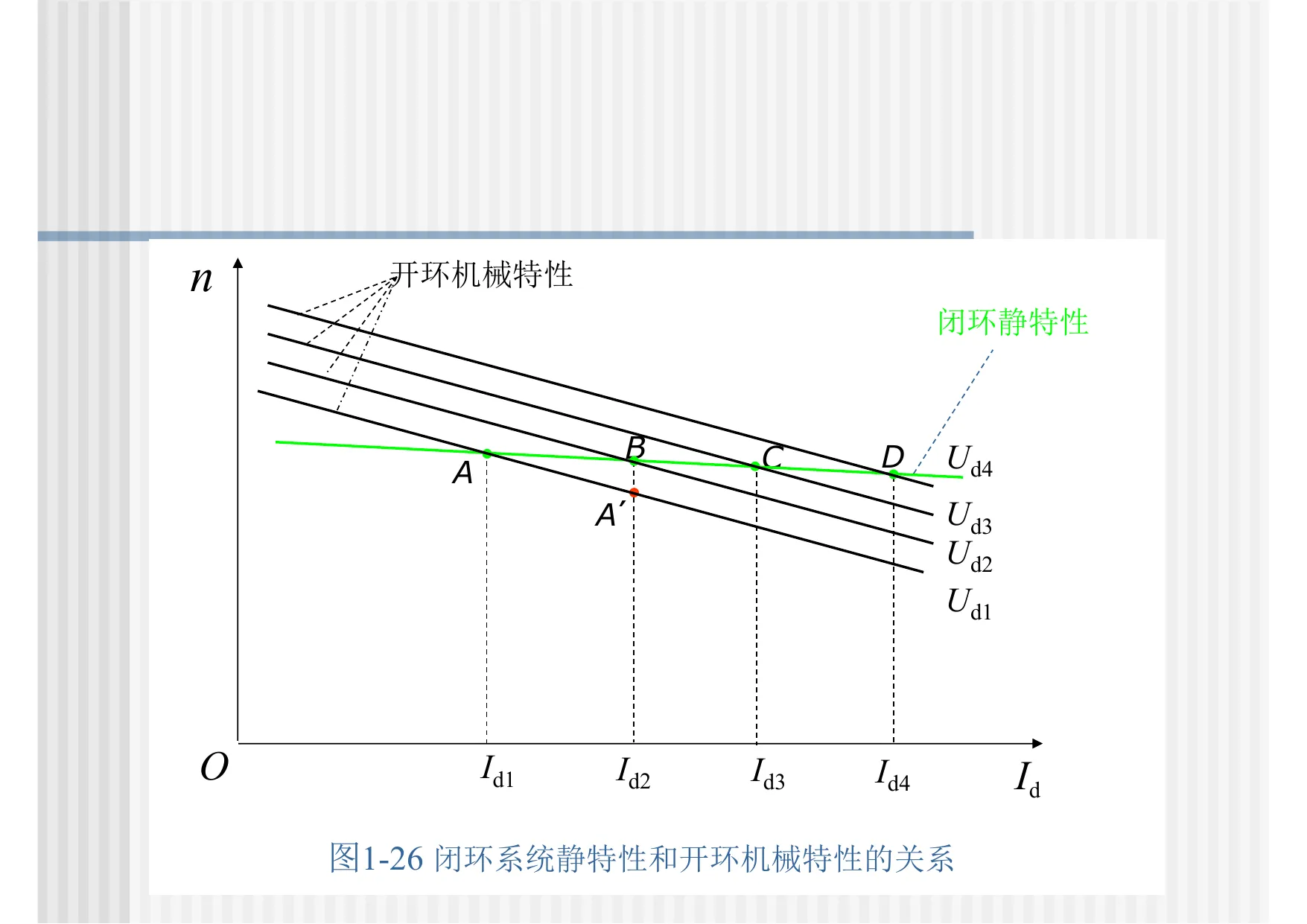
负载增加时,开环系统转速下降;闭环系统会通过反馈自动提高控制电压:
负载增加 -> 转速下降 -> 反馈电压下降 -> 偏差增大 -> 电枢电压增大 -> 转速回升闭环速降近似为:
闭环静特性比开环机械特性硬:
反馈控制规律:
- 比例闭环只能减小静差,不能消除静差。
- 反馈只能抑制被反馈环包围的前向通道扰动。
- 给定误差和测速反馈误差不会被同一个反馈环自动消除。
1.8 电流截止负反馈#
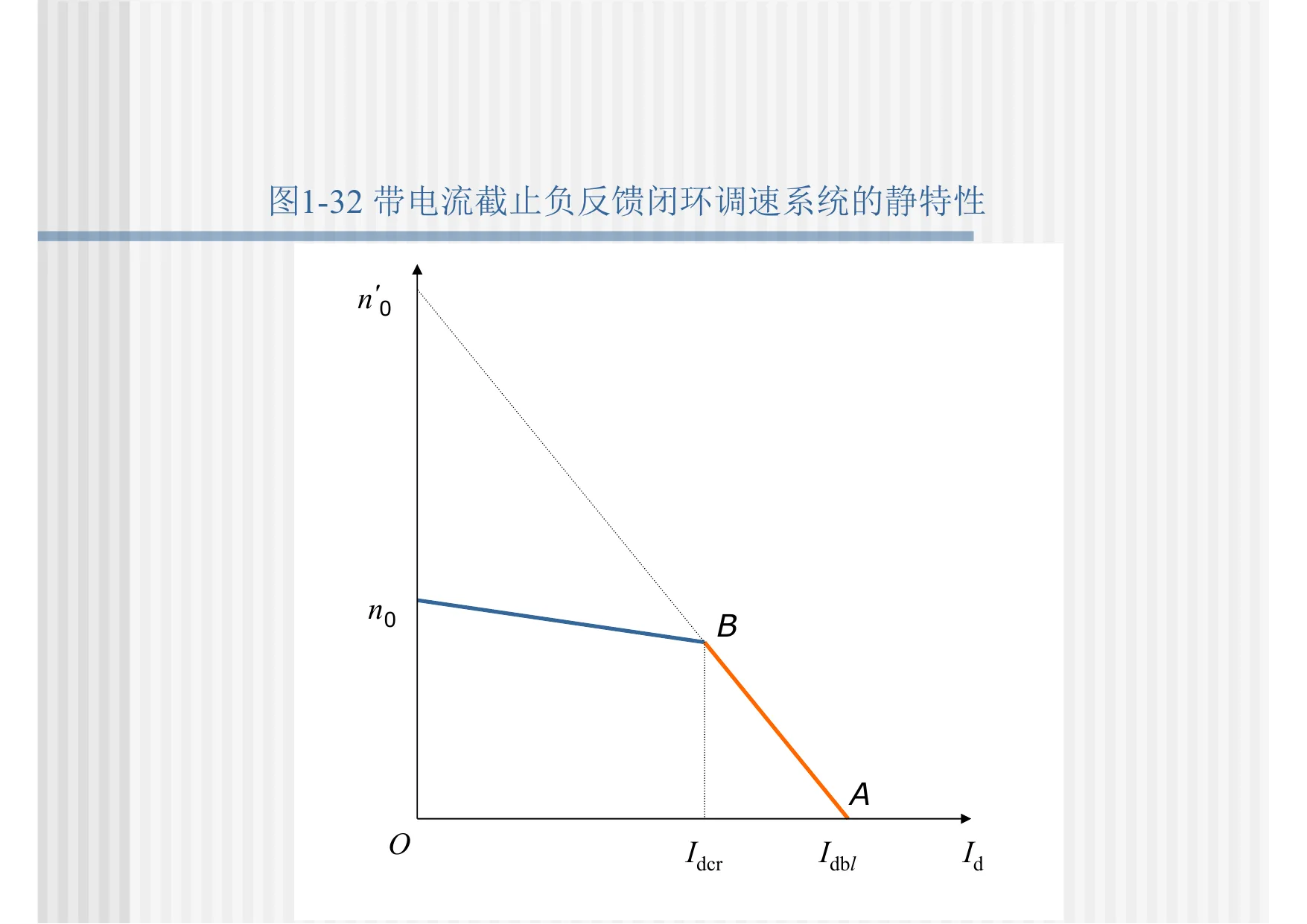
电流截止负反馈用于限流保护。其分段关系可写为:
作用:
- 正常电流范围内不影响转速负反馈。
- 电流超过临界值后接入负反馈,限制电流继续增大。
- 形成下垂的限流静特性。
注意:电流截止负反馈是被动限流,不能像第2章双闭环那样主动实现恒流起动。
1.9 PI调节器与无静差#
比例调节器:
稳态带负载运行需要非零控制量,因此必须保留偏差,所以比例系统有静差。
PI调节器:
传递函数:
只要稳态偏差不为零,积分项就继续变化,直到偏差趋近于零。因此PI调节器可以实现稳态无静差。
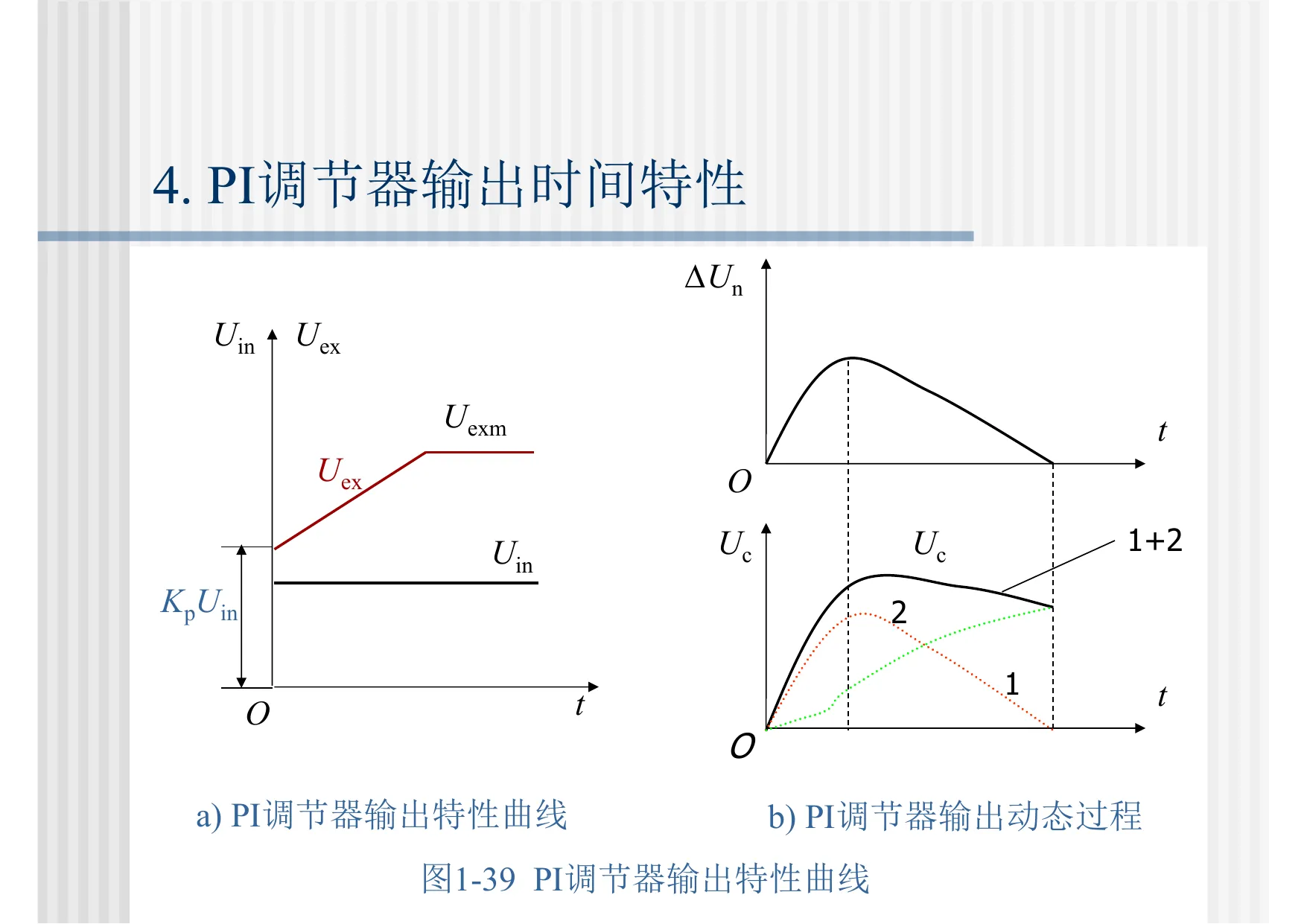
无静差不是动态过程中没有误差,而是稳态转速偏差可以为零。
1.10 本章复习抓手#
- 会写直流电机转速方程并推出三种调速方法。
- 会比较G-M、V-M、PWM三类可控直流电源。
- 会看表1-1、表1-2、表1-3,理解V-M和PWM的关键参数。
- 会定义调速范围、静差率,并推导 。
- 会解释闭环为什么能减小速降、提高静特性硬度。
- 会说明比例控制有静差,PI控制无静差。
- 会说明电流截止负反馈的分段作用和局限。