运动控制系统:双闭环直流调速
第2章重点:ASR/ACR双闭环、恒流起动、饱和退饱和、抗扰性能和工程设计方法。
本文是根据课程课件与课堂记录整理的复习笔记;原始 PDF 已在“运动控制系统:原始课件”页面提供。页码以本地 PDF 页码为准。
第2章:转速、电流双闭环直流调速系统#
2.0 课件页码与考试重点#
| 重要度 | 知识点 | 课件页码 | 复习要求 |
|---|---|---|---|
| ★★★ | 引入电流反馈的原因 | 第2章 pp. 4-10 | 会说明单闭环不能主动控制起动电流,电流控制等价于转矩控制 |
| ★★★ | 理想起动过程 | 第2章 pp. 6-10, 40-58 | 会画电流平台和转速斜坡,能解释恒流升速 |
| ★★★ | 双闭环结构 | 第2章 pp. 11-16 | 必会:ASR外环、ACR内环,ASR输出是电流给定 |
| ★★★ | 静特性和限幅 | 第2章 pp. 20-35 | 会区分ASR不饱和/饱和两段静特性 |
| ★★★ | 起动三阶段和超调 | 第2章 pp. 40-58 | 会解释电流上升、恒流升速、转速调节和超调原因 |
| ★★☆ | 动态抗扰 | 第2章 pp. 60-67 | 会区分电流环抗电网扰动、转速环抗负载扰动 |
| ★★★ | 典型I型、典型II型系统 | 第2章 pp. 71-121 | 会看表2-8、表2-9,知道不同对象对应的调节器选择 |
| ★★★ | 电流环设计 | 第2章 pp. 129-164 | 会说明电流环按典型I型设计,ACR常用PI |
| ★★★ | 转速环设计 | 第2章 pp. 129-164 | 会说明转速环按典型II型设计,ASR常用PI |
| ★★☆ | 调压与弱磁控制 | 第2章 pp. 166-198 | 会区分基速以下恒转矩、基速以上弱磁恒功率 |
视频补充:2026-03-18 课堂视频中老师明确说“第二章是本课重点,计算和最复杂系统都在这一章”。尤其强调:ASR 的输出代表电流给定,而不是直接控制电压。
2.1 本章主线#
第1章的转速单闭环系统可以减小静差,配合PI调节器还能做到稳态无静差,但它对起动电流和动态转矩的控制不够理想。第2章的核心就是引入电流内环,构成“转速外环 + 电流内环”的串级控制系统。
本章可以按下面这条线复习:
- 单闭环的不足:只能被动限流,不能得到理想起动电流。
- 双闭环结构:ASR给出电流给定,ACR控制电枢电流。
- 静特性:ASR不饱和时转速无静差,ASR饱和时系统进入恒流限流段。
- 起动过程:电流上升、恒流升速、转速调节三阶段。
- 工程设计:用典型I型和典型II型系统选择调节器并整定参数。
- 应用扩展:调压恒转矩区和弱磁恒功率区。
一句话记忆:ASR管速度,ACR管电流;起动靠电流环,稳速靠转速环;电流环典型I型,转速环典型II型。
2.2 为什么需要双闭环#
2.2.1 单闭环加电流截止的不足#
第1章的转速负反馈系统可以改善静态性能,但在动态过程中存在问题:
- 突加给定时,转速偏差很大,系统可能给出过大的控制量,导致电枢电流冲击。
- 电流截止负反馈只能在电流超过临界值后被动限制,不能主动把电流控制在理想值。
- 起动过程中没有充分利用电机允许过载能力,起动时间可能不是最短。
- 电网电压扰动直接影响电枢电流,单纯转速环反应较慢。
理想起动希望电枢电流迅速升到允许最大值,并在主要加速阶段保持:
这样电磁转矩近似恒定:
由运动方程:
得到恒流升速阶段:
若负载转矩近似不变,则右端近似为常数,转速近似线性上升:
这就是双闭环“恒流升速”的数学依据。
2.2.2 电流内环的意义#
电流与转矩直接相关:
在励磁磁通 基本不变时,控制电流就是控制电磁转矩,也就是控制加速度。电流环使系统能快速做到:
- 电流跟随给定。
- 限制最大电流。
- 抑制电网电压波动对电流的影响。
- 把电力电子变换器和电枢回路整理成较快的内环,便于外环设计。
2.3 双闭环系统结构#
双闭环系统采用两个调节器串级连接:
转速给定 U_n* -> ASR -> 电流给定 U_i* -> ACR -> UPE -> 电机 -> n
^ |
| v
电流反馈 βI_d <- 电流检测 转速反馈 αn| 符号 | 名称 | 作用 |
|---|---|---|
| ASR | 转速调节器 | 外环调节器,输入是转速偏差,输出是电流给定 |
| ACR | 电流调节器 | 内环调节器,输入是电流偏差,输出控制UPE |
| UPE | 电力电子变换器 | 改变电枢电压,执行控制命令 |
| TG | 测速发电机/测速环节 | 产生转速反馈 |
| TA | 电流检测环节 | 产生电流反馈 |
反馈关系:
ASR输入偏差:
ACR输入偏差:
关键关系:
所以 ASR 的输出不是电压命令,而是电流命令。这个点很容易出判断题。
2.4 PI调节器和限幅#
ASR、ACR通常都采用PI调节器。一般形式为:
可分别写为:
两个限幅值必须记住:
- ASR输出限幅 :决定最大电流给定。
- ACR输出限幅 :限制电力电子变换器控制电压。
最大允许电流为:
正常稳态时,PI调节器输入偏差为零,因此:
2.5 静特性:ASR不饱和与饱和#
双闭环系统静特性不是单一线性段,而是由调节器是否饱和决定。
| 工作状态 | ASR状态 | ACR状态 | 主导环节 | 系统表现 |
|---|---|---|---|---|
| 正常调速 | 不饱和 | 不饱和 | 转速环 | 转速无静差, |
| 起动、堵转、过载 | 饱和 | 通常不饱和 | 电流环 | 电流受限, |
理解方式:
- ASR不饱和时,转速偏差经过PI调节,系统靠转速负反馈维持给定转速。
- ASR饱和时,ASR输出固定为 ,相当于给电流环一个固定最大电流给定。
- 因此,双闭环系统能自动在“稳速”和“限流”之间切换。
2.6 起动过程三阶段#
突加转速给定从静止起动时,典型过程分为三段。
2.6.1 第I阶段:电流上升#
起动初期,转速 ,转速反馈 很小,转速偏差很大。ASR输出迅速上升并进入饱和,ACR使电枢电流迅速上升。
特点:
- ASR由不饱和很快进入饱和。
- 电流从 上升到 附近。
- 转速尚未明显升高。
2.6.2 第II阶段:恒流升速#
ASR保持饱和:
因此:
电机以最大允许电流产生较大电磁转矩,转速近似线性上升。这是双闭环系统最重要的优势:在不超过允许电流的前提下尽可能快地起动。
2.6.3 第III阶段:转速调节#
转速接近给定值后,转速偏差减小。但PI调节器在饱和期间积累了积分量,ASR不会立刻退饱和,所以转速通常会有超调。
超调后:
- 转速反馈大于给定。
- 转速偏差变负。
- ASR退饱和。
- 电流下降到负载电流。
- 系统进入稳态转速调节。
结论:双闭环PI系统起动快,但常有转速超调;超调来自ASR饱和和积分作用。
2.7 动态抗扰性能#
双闭环系统的抗扰要按扰动位置区分。
| 扰动 | 主要抑制环节 | 原因 |
|---|---|---|
| 电网电压波动、UPE增益变化 | 电流环ACR | 扰动位于电流环以内,电流反馈能快速修正 |
| 负载转矩扰动 | 转速环ASR | 扰动作用在电机机械轴上,最终表现为转速变化 |
| 给定电压误差、测速反馈误差 | 不能靠同一反馈环自动消除 | 它们在比较点或反馈通道上,不属于被环包围的前向扰动 |
记忆:ACR抗内扰,ASR抗负载;内环快,外环慢。
2.8 工程设计方法:典型系统和调节器选择#
工程设计法的基本思想是:把复杂闭环系统通过校正近似整理成典型I型或典型II型,再按典型系统性能指标选择参数。
基本步骤:
- 建立动态结构图。
- 合并小惯性环节。
- 根据控制对象选择调节器形式。
- 用调节器零点抵消对象中的大惯性环节。
- 整理成典型I型或典型II型。
- 根据超调量、调节时间、抗扰要求整定参数。
2.8.1 典型I型系统#
典型I型系统常见开环传递函数:
特点:
- 一个积分环节。
- 结构简单。
- 跟随性能较好。
- 超调相对容易控制。
- 适合电流环。
2.8.2 表2-8:校正成典型I型系统的调节器选择#
表2-8是本章工程设计的重点表之一。它告诉我们:不同控制对象要校正成典型I型时,应选什么调节器,以及调节器零点如何与对象时间常数配合。
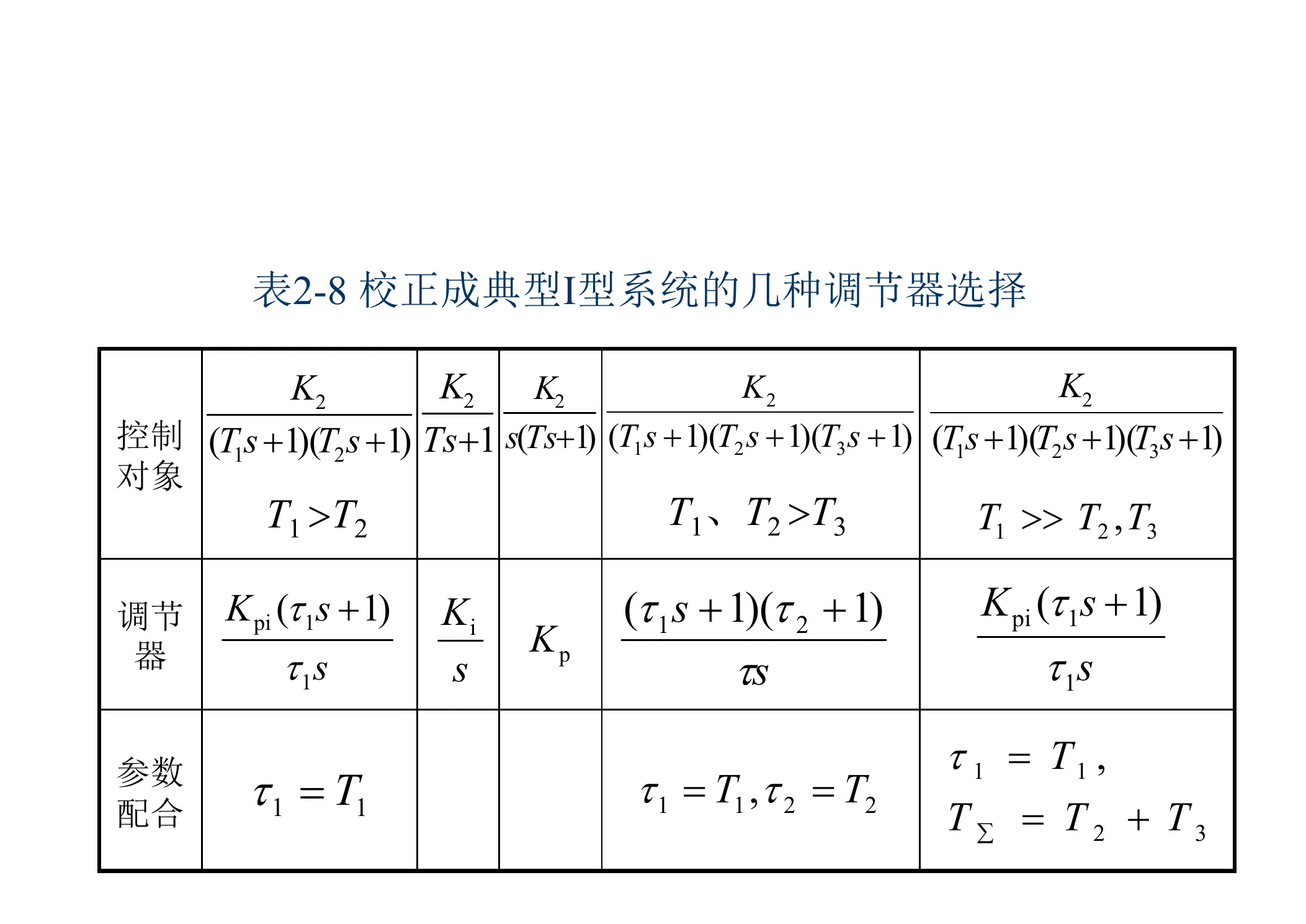
表2-8最需要会用的几种情况:
| 控制对象 | 适合调节器 | 参数配合 | 复习理解 |
|---|---|---|---|
| , | PI: | 用PI零点抵消较大的惯性环节,剩下小惯性和积分,整理成典型I型 | |
| I: | 无需零点抵消 | 对象只有一个惯性环节,加积分即可形成典型I型 | |
| P: | 无需积分 | 对象本身已有积分环节,用比例调节即可 | |
| , | PID或双零点调节器: | 用两个零点抵消两个较大惯性环节 | |
| , | PI: | 大惯性用PI零点抵消,小惯性合并为 |
这张表和电流环设计直接相关:电流环对象通常有一个电枢电磁时间常数和若干小惯性环节,所以常用PI调节器,并令PI零点抵消电枢回路的大惯性。
2.8.3 典型II型系统#
典型II型系统常见开环传递函数:
特点:
- 两个积分环节。
- 抗扰性能好。
- 阶跃扰动下稳态误差小。
- 跟随阶跃给定时超调可能较大。
- 适合转速环。
2.8.4 表2-9:校正成典型II型系统的调节器选择#
表2-9用于转速环一类更重视抗扰能力的系统设计。
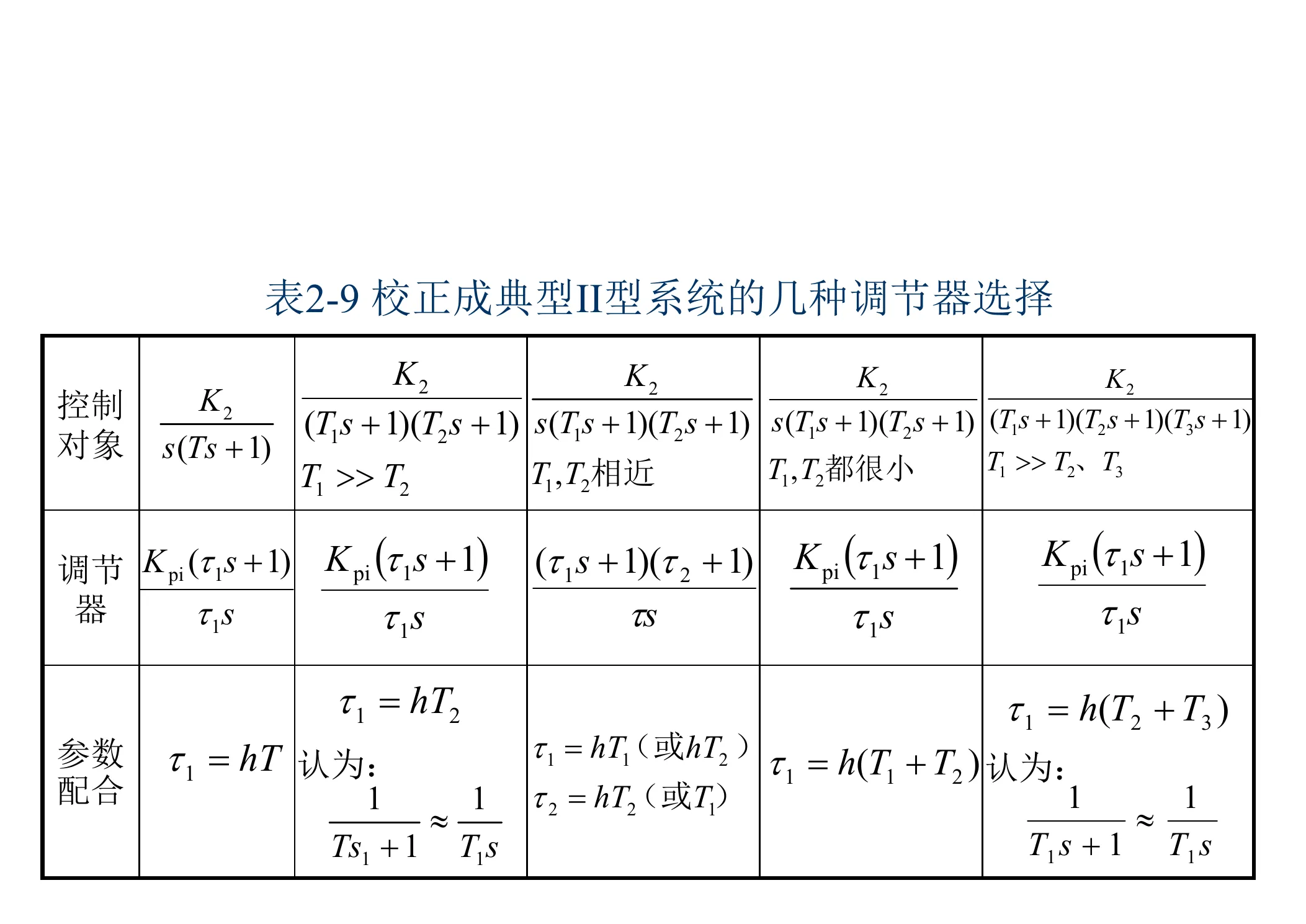
表2-9的复习重点不是把每一列完整背下,而是掌握规律:
- 若对象已有一个积分环节,再配合PI调节器,容易形成典型II型。
- 若存在特别大的惯性环节,可近似看作积分环节:
- 参数中常出现 ,它是典型II型系统中用于折中跟随性能和抗扰性能的中频宽参数。
- 转速环通常按典型II型设计,是因为负载扰动作用在机械环节,抗扰要求比单纯跟随更重要。
2.9 电流环设计#
2.9.1 电流环的设计目标#
电流环设计以跟随性能为主,要求:
- 电流快速跟随电流给定。
- 电流超调不能太大。
- 能限制最大电流。
- 能抑制电网电压扰动。
- 设计完成后可等效为转速环中的小惯性环节。
2.9.2 电流环对象近似#
电枢回路可近似为:
其中:
电力电子变换器近似为:
电流检测滤波环节近似为:
把小惯性合并:
2.9.3 ACR选择#
根据表2-8,电流环常采用PI调节器:
令PI零点抵消电枢回路的大惯性:
这样电流环可校正为典型I型系统。
校正后电流环近似开环形式:
这就是“电流环典型I型”的来源,不是死记结论。
2.10 转速环设计#
2.10.1 转速环的设计目标#
转速环设计以抗负载扰动为主,要求:
- 稳态转速无静差。
- 负载扰动引起的动态速降小。
- 恢复时间合理。
- 与电流环分工明确,外环慢于内环。
2.10.2 电流环等效#
电流环设计完成后,可把它等效为快速小惯性环节:
机械运动环节本质是积分环节:
因为:
所以转速环对象中天然含有机械积分环节。
2.10.3 ASR选择#
转速环通常采用PI调节器:
配合机械积分环节后,系统可校正为典型II型:
因此,转速环“典型II型”的原因是:它要强化抗负载扰动能力,同时PI调节器和机械积分环节共同形成两个积分环节。
2.11 调压与弱磁控制#
直流电机基速以下采用调压调速,保持励磁磁通为额定值:
转速方程:
此时允许电流基本不变,电磁转矩能力近似不变:
所以基速以下为恒转矩调速。
基速以上,电枢电压达到额定值,不能继续升高:
若继续升速,需要减弱磁通:
磁通减小时,同样电流下的转矩下降:
若输出功率近似不变:
则转速升高时转矩下降,属于恒功率调速。
| 区域 | 控制方式 | 磁通 | 性质 |
|---|---|---|---|
| 基速以下 | 调电枢电压 | 恒转矩 | |
| 基速以上 | 电压额定,减弱磁通 | 恒功率 |
2.12 本章复习抓手#
- 会画双闭环结构图:ASR外环、ACR内环。
- 会解释为什么ASR输出是电流给定,而不是电压给定。
- 会写 、、。
- 会描述起动三阶段:电流上升、恒流升速、转速调节。
- 会解释转速超调来自ASR饱和和PI积分作用。
- 会区分ACR和ASR的功能:ACR限流和抗电网扰动,ASR稳速和抗负载扰动。
- 会看表2-8:典型I型调节器选择,尤其是PI零点抵消大惯性。
- 会看表2-9:典型II型调节器选择,尤其是转速环抗扰设计。
- 会说明电流环按典型I型设计,转速环按典型II型设计。
- 会区分基速以下调压恒转矩、基速以上弱磁恒功率。