第 2 章 控制系统的数学模型#
时域:微分方程,差分方程,状态空间模型
频域:传递函数,方块图,频率特性
时域转换成频域:线性系统可以使用傅里叶变换和拉普拉斯变换
2.1 微分方程#
从输入端开始,按信号流向列方程,依次写出控制系统中各原件输入量与输出量之间的微分方程
消去中间变量,得到输出量与输入量的关系
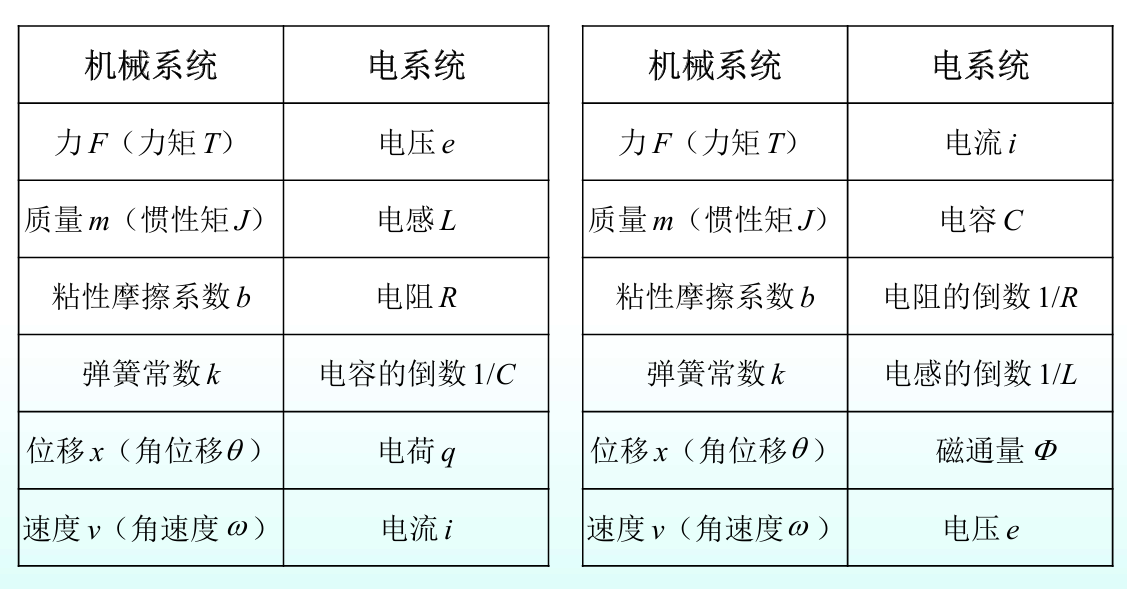
机械系统#
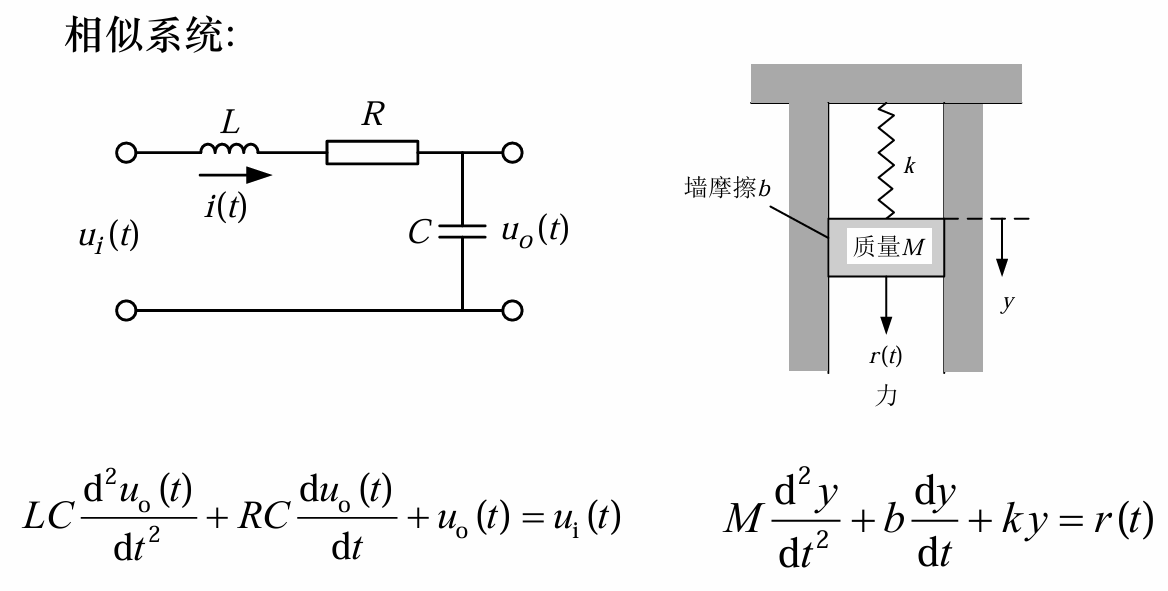
例:质量,弹簧,阻尼器系统
倒立摆
电路系统#
相似系统:(放一张系统建模的课件)
机电系统(重点是电枢电压控制)#
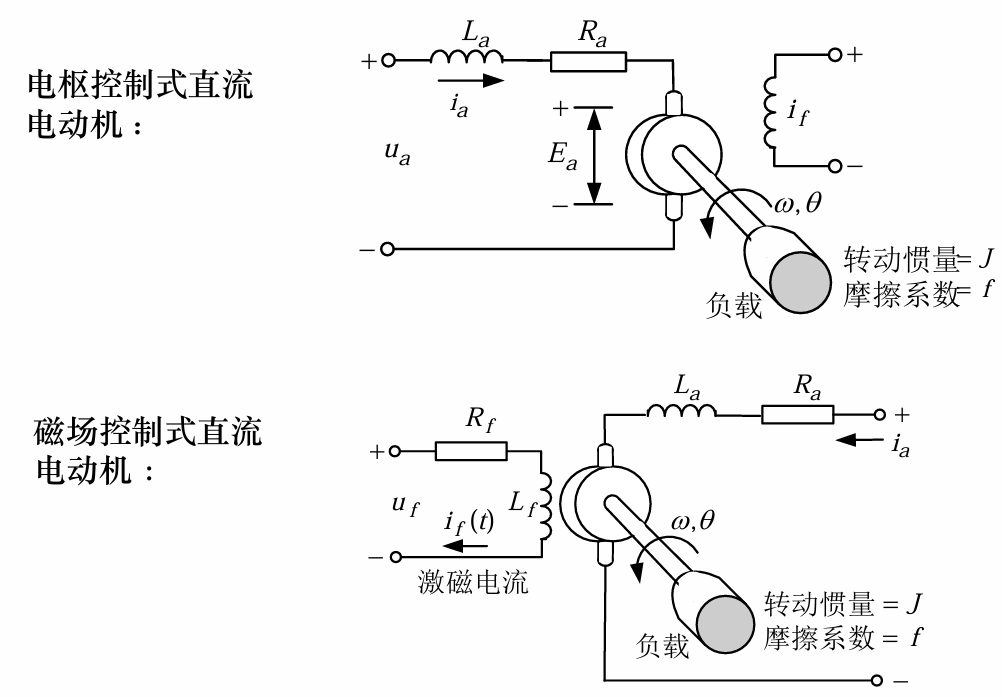
电枢是 armature
磁场是 Magnetic field
2.2 传递函数#
零初始条件下,系统输入量的拉普拉斯变换与输入量的拉普拉斯变换之比
零初始条件如图:
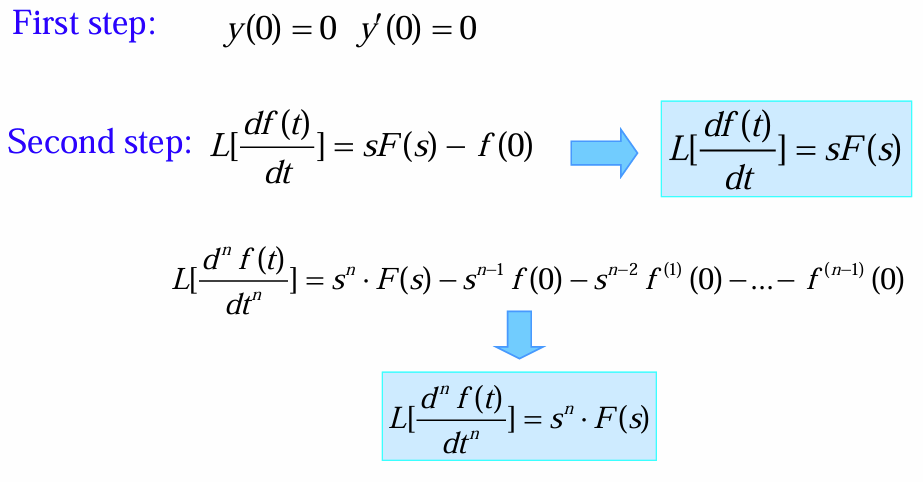
- 只用于描述线性定常系统
非零初始条件下的动态响应:#

在本题中的应用#
在本题中,已知总响应和输入,要求传递函数。解题步骤是:
- 从总响应中减去由输入引起的零状态响应中的强制响应(常数项),得到包含指数模式的剩余部分。
- 但更直接的方法是:利用初始条件确定零输入响应。因为零输入响应只与初始条件和系统特征根有关,而特征根可以从总响应的指数项中看出-1和-2。所以将零输入响应设为是合理的。
- 然后利用给定的初始条件和解出系数 a 和 b 。注意:这里的初始条件是总响应的初始条件,但零状态响应在 t=0 时通常为零(因为零状态响应是输入引起的,且系统初始松弛),所以零输入响应的初始条件就等于总响应的初始条件。
- 得到零输入响应后,从总响应中减去它,就得到了零状态响应
- 对和输入分别取拉普拉斯变换,它们的比值就是传递函数
总结#
关键点:
- 零输入响应的形式由系统特征根决定,与输入无关。
- 从总响应的指数项可以推断系统的特征根(极点)。
- 因此,可以将零输入响应设为这些特征根对应的指数模式的线性组合,然后利用初始条件确定系数。
这种方法是线性系统时域分析的标准步骤,它基于系统的线性叠加原理和微分方程解的结构理论。
1. 比例环节#
2. 惯性环节#
3. 积分环节#
4. 微分环节#
5. 振荡环节#
6. 滞后环节s#
2.3 方块图#
组成和绘制#
简化#
原则#
- 相加点向相加点移动
- 分支点向分支点移动
- 相加点与分支点尽量不交换,也可以换
规则#
相加点后前移
分支点前后移
消去反馈回路
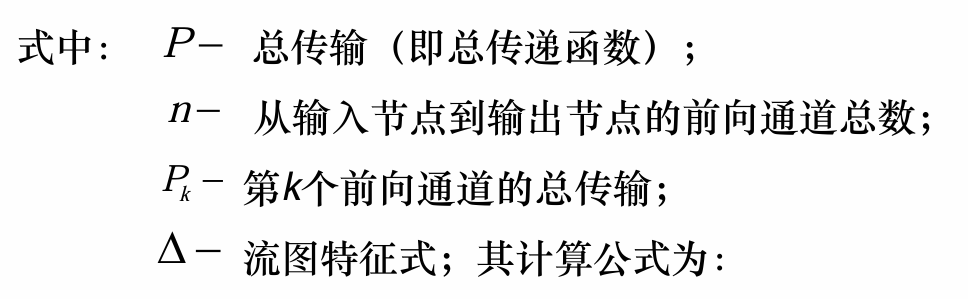
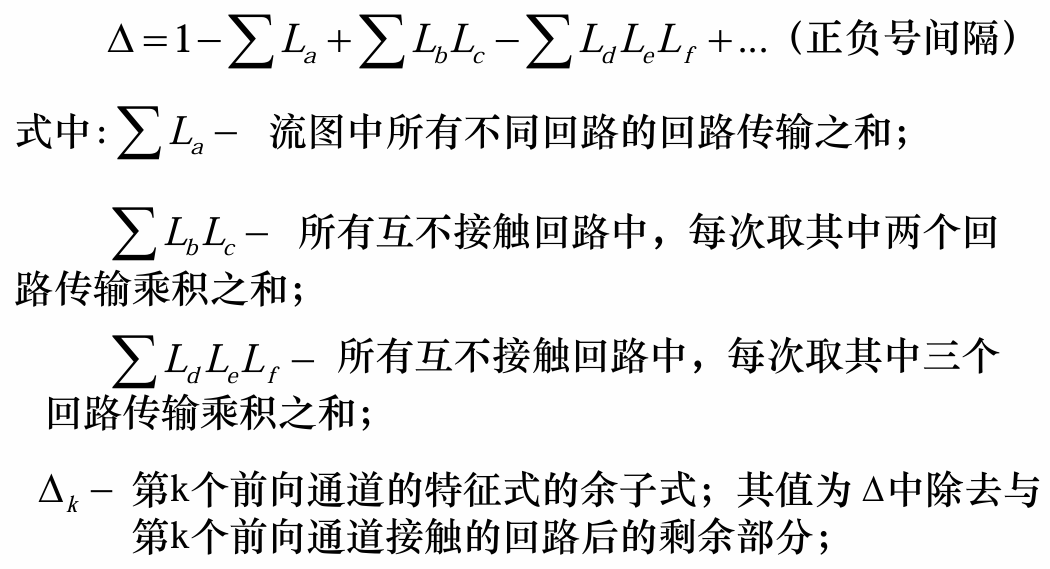
2.4 信号流图#
组成和建立#
梅森增益公式#