第 3 章 线性系统的时域分析法#
时域分析:控制系统在一定的输入信号(阶跃,脉冲)作用下,根据系统输出量的时域表达式,分析系统的稳定性、瞬态和稳态性能
3.1 典型输入信号和时域性能指标#
典型输入信号#
- 脉冲函数
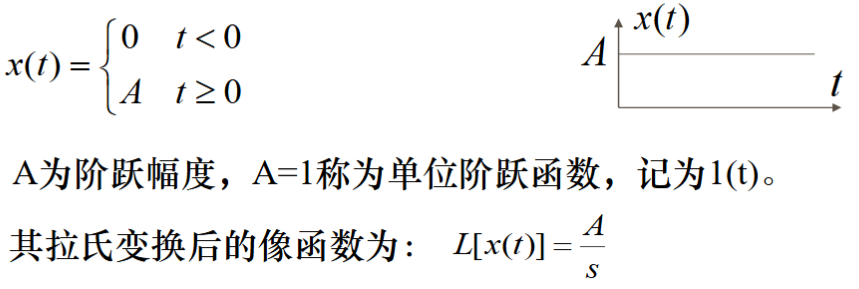
- 阶跃函数
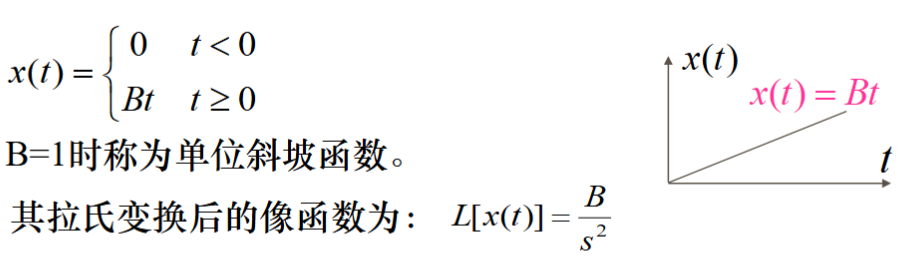
- 斜坡函数
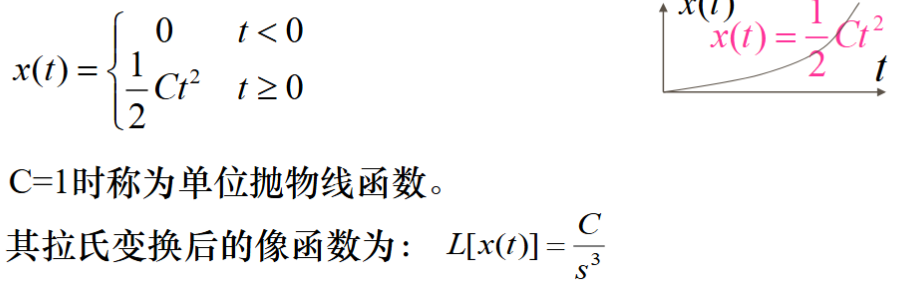
- 抛物线函数
- 正弦函数

典型响应#
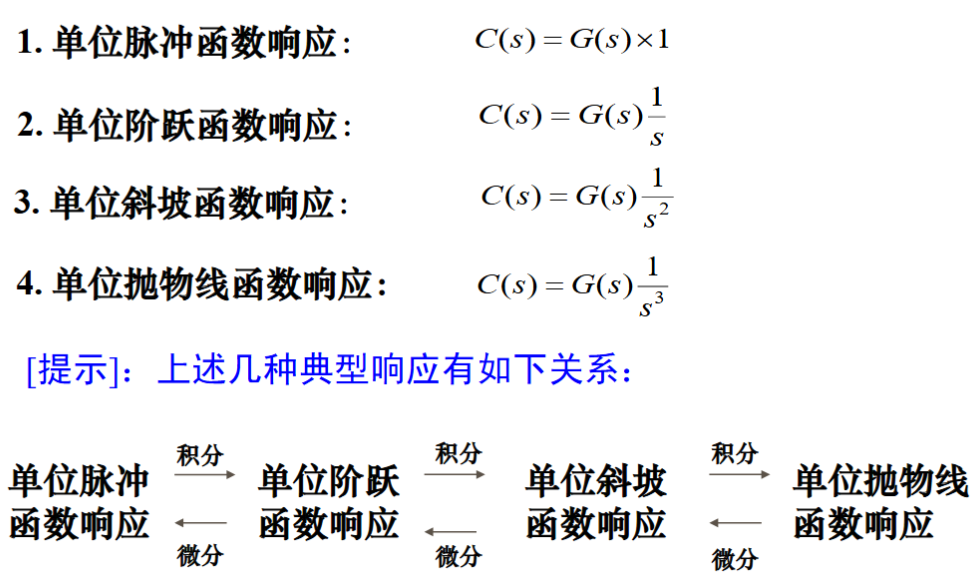
微分方程的解#
- 通解
- 特解
- 稳态响应/过程
- 瞬态响应/过程
瞬态响应的性能指标#
通常以_阶跃响应_来衡量系统控制性的优劣和定义瞬态过程的时域性能指标。稳定的系统的单位阶跃响应函数有衰减振荡和单调变化两种。
衰减振荡#
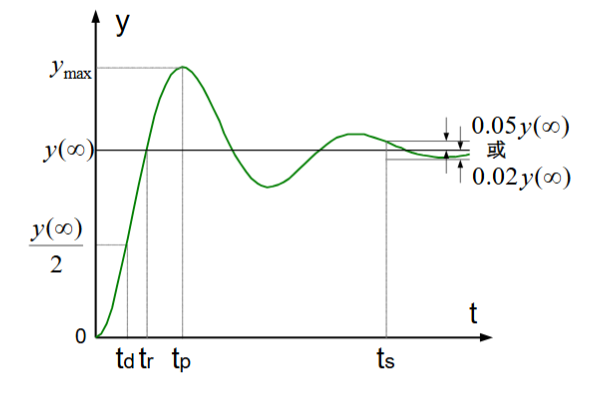
- 延迟时间 td
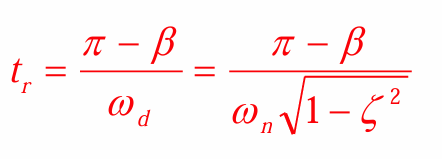
- 上升时间 tr
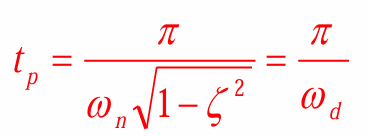
- 峰值时间 tp
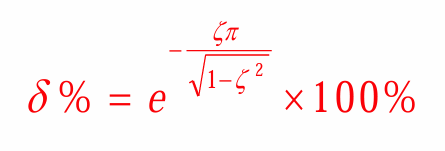
- 最大超调量 δ%
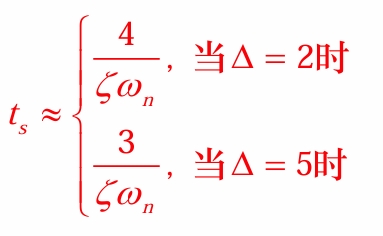
- 调节时间 ts ( 5 或者 2 )
振荡次数 N
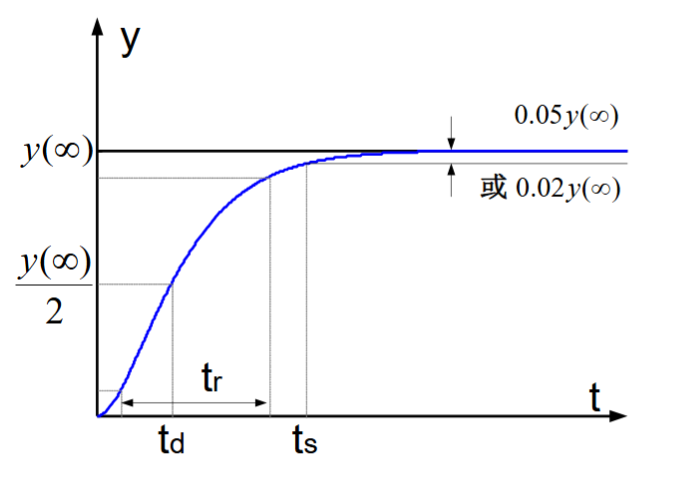
单调变化#
没有峰值时间,最大超调量
3.2 一阶系统的瞬态响应#
一阶系统的数学模型#
积分环节+反馈环节=惯性环节
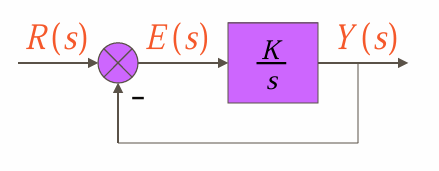
K = 1 / T
时间常数 T 反映了系统的惯性,T 越大惯性越大,系统响应速度越慢
一阶系统的单位脉冲响应#
一阶系统的单位阶跃响应#
一阶系统的单位斜坡响应#
一阶系统的单位加速度响应#
一阶系统的瞬态性能指标#
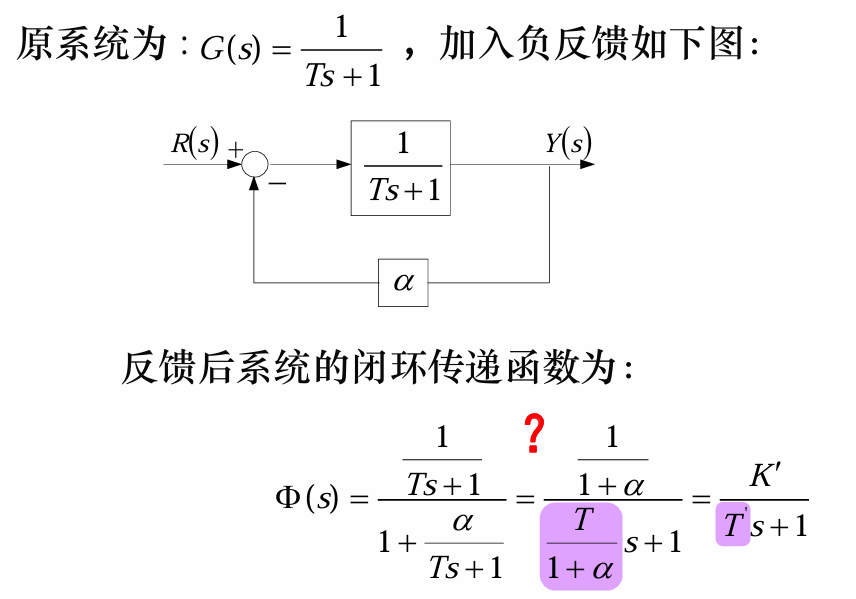
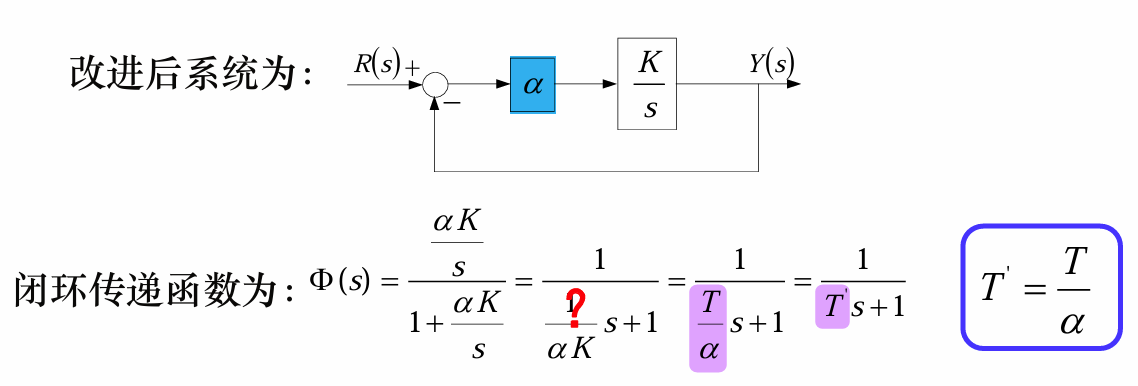
减小一阶系统时间常数的方法#
负反馈:减小了 T,也减小了输出幅值
串联比例环节(增大 K)
小结#
- 一阶系统的传递函数和典型结构图
- 一阶系统的单位阶跃响应(单调上升曲线,性能指标常用调整时间)
- 减小一阶系统时间常数的方法(为什么要减小时间常数)
3.3 典型二阶系统的瞬态响应#
典型二阶系统的数学模型#
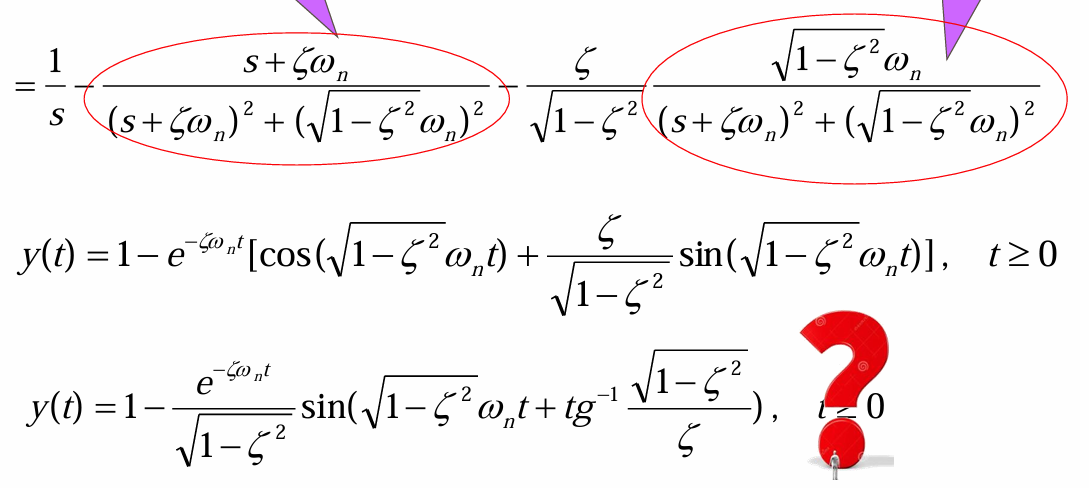
典型二阶系统的单位阶跃响应#
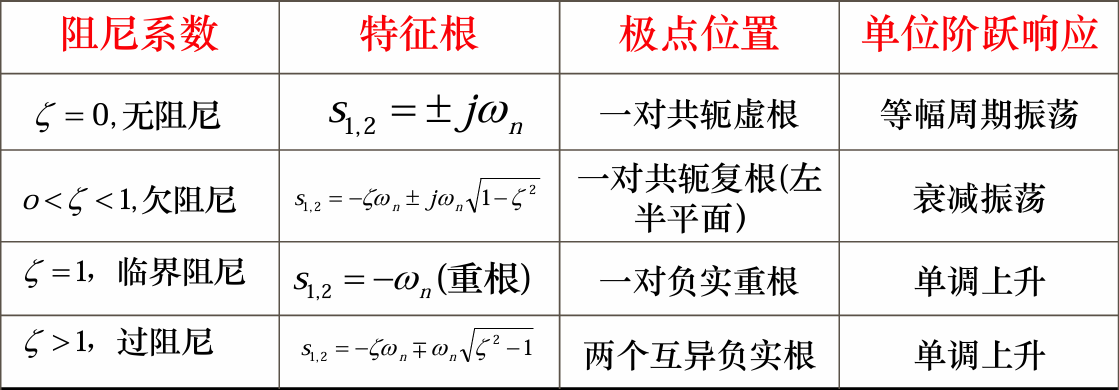
四种情况划分#
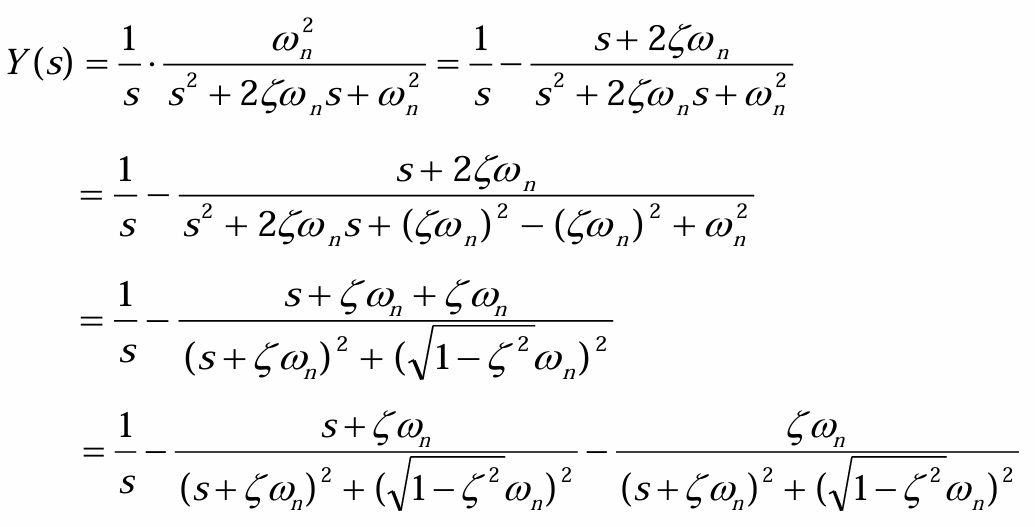
欠阻尼系统的输出响应表达式#
推导:
极点的负实部越小,衰减越快
虚部越小,振荡频率越小
过阻尼系统#
阻尼系数远大于 1 时,系统降为 1 阶
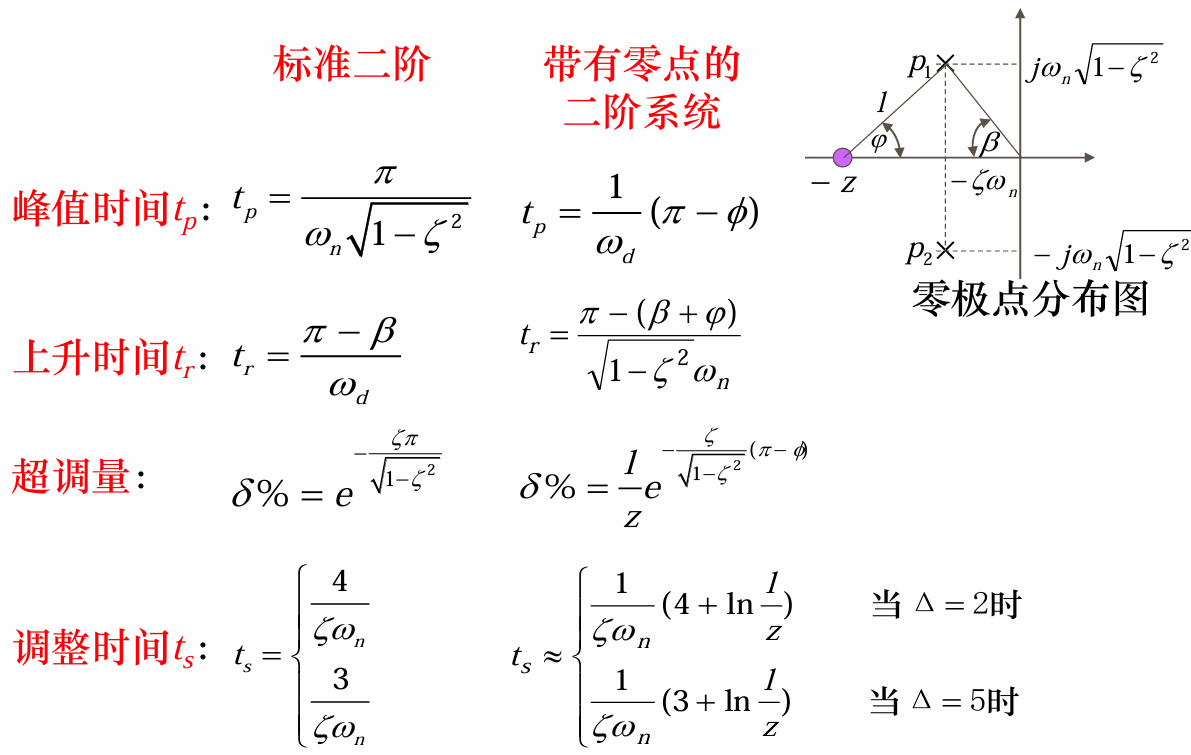
典型二阶系统的性能指标与其系统参数的关系#
改善二阶系统响应特性的措施#
速度反馈#
自然角频率和开环增益都不变
比例微分顺馈:增加了一个闭环零点#
自然角频率不变,开环增益减小
变化前(无速度反馈):系统的开环传递函数为 。此时开环增益为: 变化后(有速度反馈):此时外环的开环传递函数变成了 。新的开环增益为:
对比#
- 对开环增益和自然频率的影响: 比例微分控制对系统的开环增益和自然频率均无影响;速度反馈控制虽不影响自然频率,但却会降低开环增益。因此,对于确定的常值稳态误差,速度反馈控制要求有较大的开环增益。开环增益的加大,必然导致系统自然频率增大,在系统存在高频噪声时,可能引起系统共振
- 对动态过程的影响:在相同阻尼比的条件下,比例微分控制系统的超调量会大于速度反馈控制系统的超调量(因为零点具有导数作用,比例微分是在前向通道中添加零点,既添加了开环零点又添加了闭环零点,速度反馈是在反馈通道中添加了开环零点,而没有添加闭环零点)
具有零点的二阶系统分析#
小结#
- 二阶系统的动态性能指标基于两个条件
- 性能指标是根据系统对单位阶跃输入的响应给出的
- 初始条件为零
- 典型二阶系统的瞬态响应
- 二阶无阻尼、欠阻尼、临界阻尼和过阻尼系统的阻尼系数、特征根、极点分布和单位阶跃响应
- 典型二阶系统的性能指标
- 主要是超调量和调整时间
- 与系统参数的关系
- 速度反馈校正
- 具有零点的二阶系统
- 单位阶跃响应的紧凑形式
- 性能指标
- 微分顺馈校正
3.4 高阶系统分析#
三阶系统:二阶系统+惯性环节(多一个极点)
稳态项+实极点项+共轭复极点项
高阶系统的单位阶跃响应取决于闭环系统的零、极点分布
极点位置决定衰减快慢,零点和极点同时决定各项系数的大小
极点的影响#
- 距虚轴近的极点对应的项衰减得慢;距虚轴远的极点对应的项衰减得快
- 距虚轴近的极点对应的系数大,而距虚轴远的极点对应的系数小
零点的影响#
- 零点不影响响应的形式。零点只影响各项的系数
- 零点若靠近某个极点,则该极点对应项的系数就小
例:
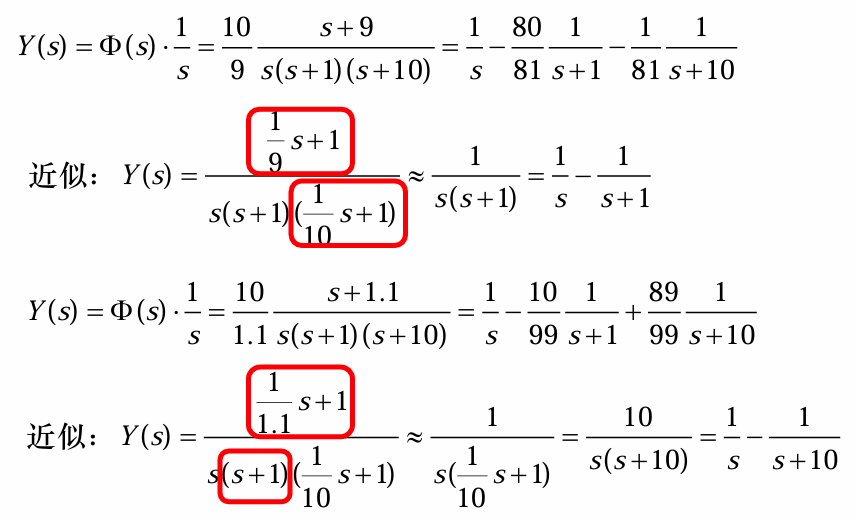
偶极子#
一对零极点,距离小于极点到虚轴距离的十分之一,可以忽略
主导极点#
条件:
- 离虚轴最近的一对共轭极点或一个实极点
- 极点附近无零点
- 其他极点距虚轴的距离是离虚轴最近的极点距虚轴的距离的5倍以上
系统性能主要由主导极点决定,系统传递函数表现为只有主导极点(二阶或一阶),其他被忽略
3.5 稳定性和代数稳定判据#
稳定性#
渐进稳定性
有界输入有界输出稳定性 BIBO
稳定充要条件:闭环极点位于左半平面,或劳斯阵第一列为正
稳定必要条件:闭环特征方程不缺项,且每一项系数同号
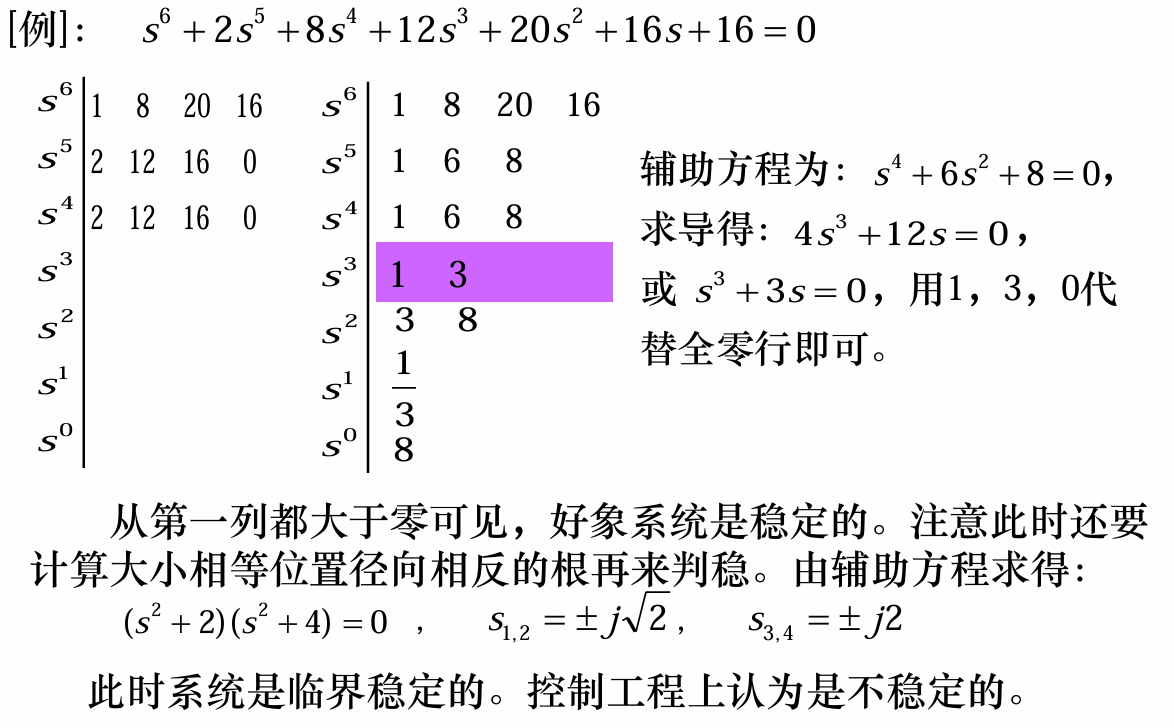
劳斯稳定判据#
- 用一个正数去乘或除某整行,不会改变系统的稳定性结论
- 劳斯阵第一列所有系数均不为零,但也不全为正数,则系统不稳定,在s右半平面上有极点
- 极点个数等于劳斯阵列第一列系数符号改变的次数
- 劳思阵某一行第一列系数为零,而其余系数不全为零,用小正数 ξ 代替
- 劳斯阵某行系数全为零的情况:处理方法如图
赫尔维茨判据#
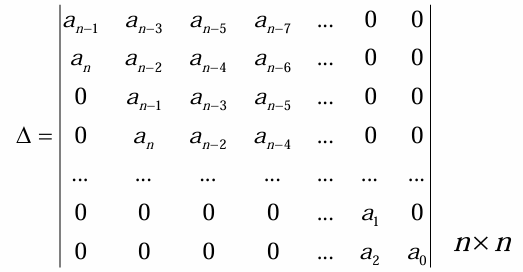
稳定充要条件:
- an >0,且余子式>0
- ai >0,且奇数或偶数余子式>0
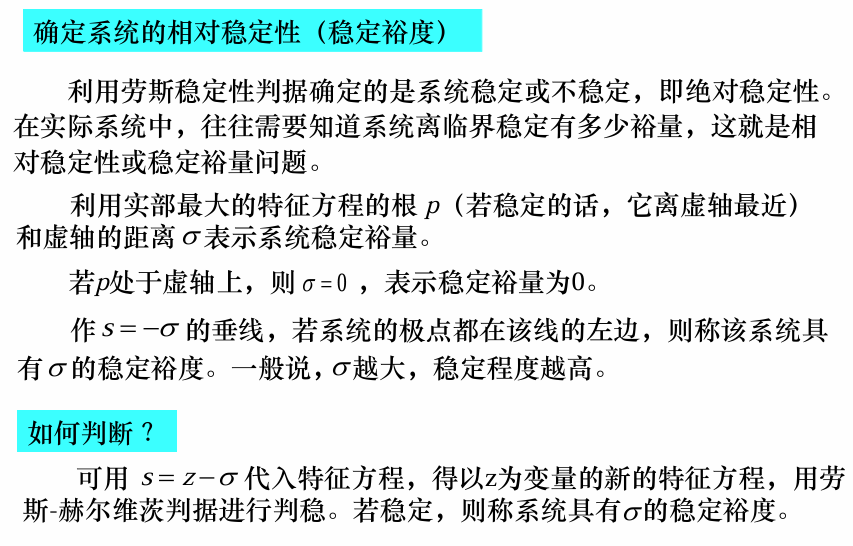
相对稳定性(稳定裕度)#
一张图概括:
结构不稳定(缺项)系统及其改进措施#
一是改变积分性质,二是引入开环零点,都是为了补上缺项
- 反馈消除积分环节
- 速度反馈
- 比例微分引入开环零点
3.6 稳态误差分析#
Steady-State Errors
- 只有稳定的系统计算稳态误差才有意义
- 使用拉氏变换终值定理计算
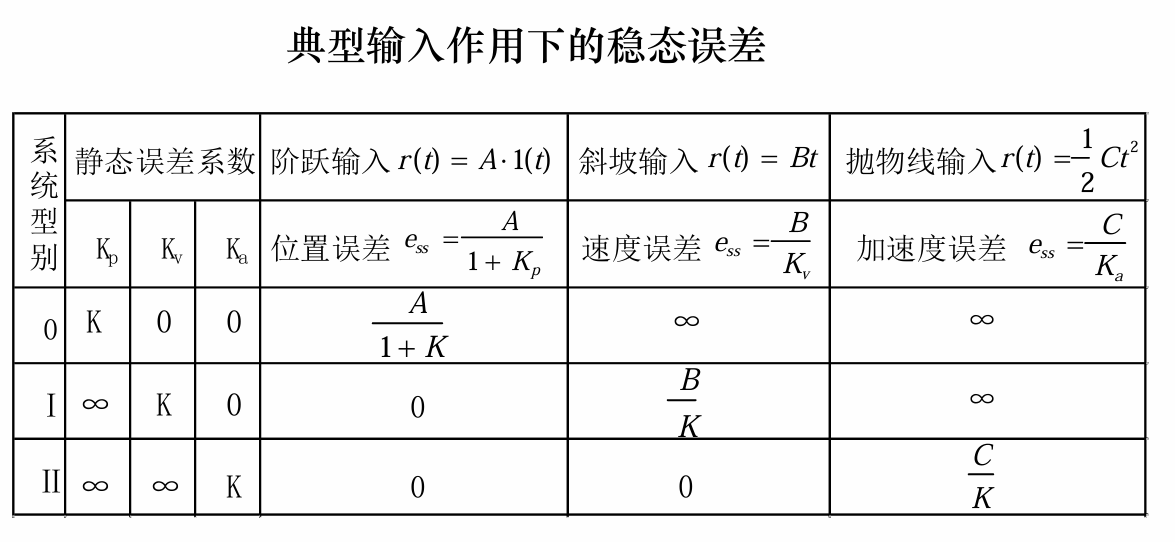
典型输入下的稳态误差:#
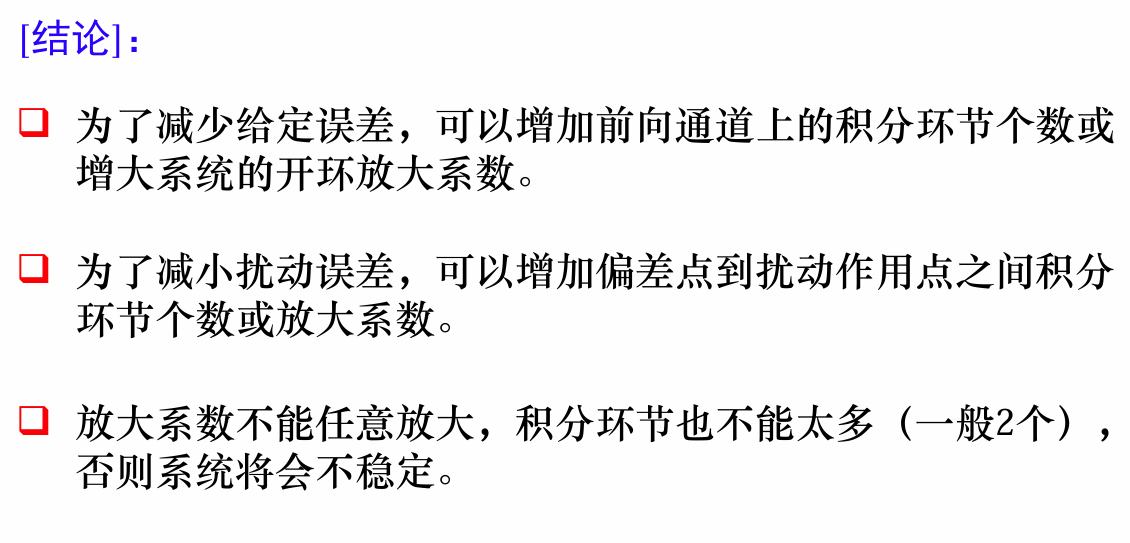
- 稳态误差与输入 R(s)、开环增益 K、系统型次 v (无差度阶数/积分环节数)有关
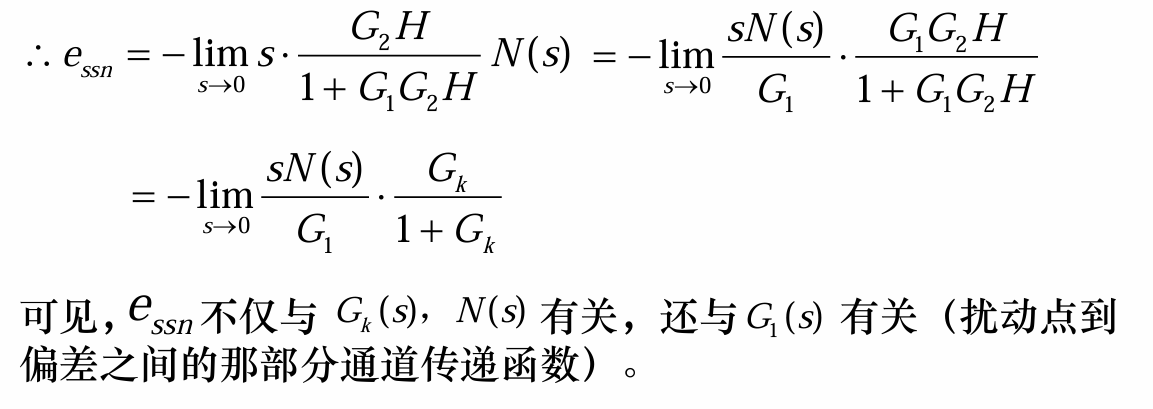
扰动输入作用下的稳态误差:#
- 稳态误差与扰动输入 N(s)、开环增益 K、系统型次 v (无差度阶数/积分环节数),G1(s) 有关
消除误差的方法#