第 4 章 线性系统的根轨迹分析法#
4.1 根轨迹的基本概念#
根轨迹定义#
开环系统传递函数的某一个参数变化时,闭环系统特征方程的根在复平面上变化的轨迹
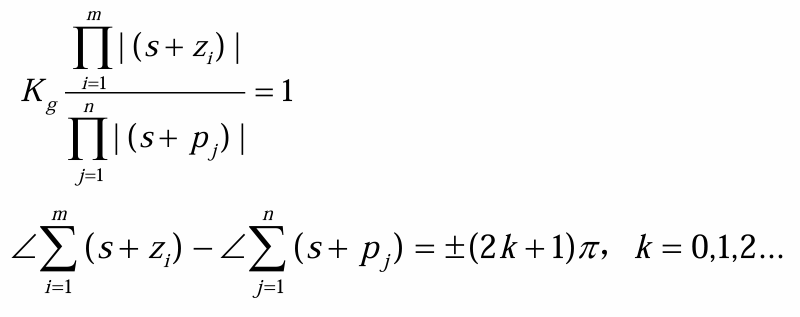
根轨迹方程#
开环传递函数等于 -1
幅值条件,相角条件:(kg>0 的情况)180° 等相角根轨迹
4.2 根轨迹的绘制方法#
概念#
- 对称于实轴
- 分支数等于 max (开环零点数 m,开环极点数 n)
- 起点:极点;终点:零点和无穷远
- 渐进线:n-m 条,在实轴上交于一点
- 实轴上的根轨迹:若实轴上某点右边的开环零点和开环极点数之和为奇数,则该点是根轨迹上的点
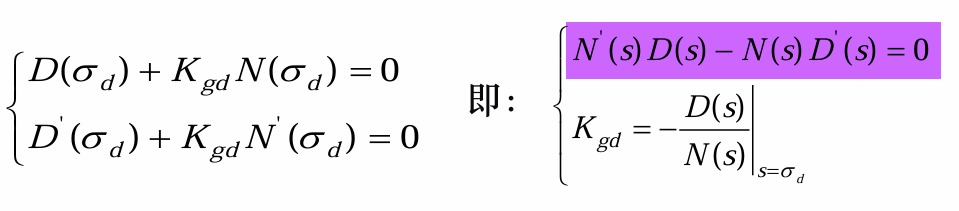
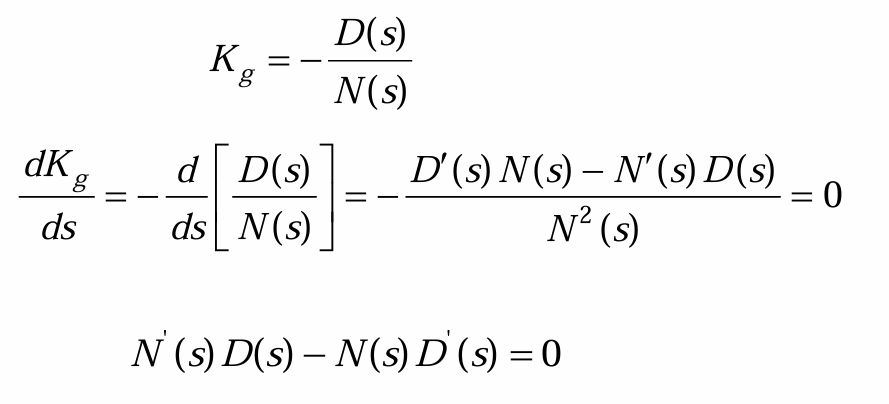
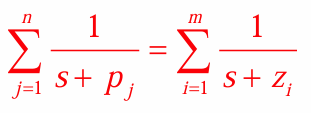
- 分离会合点:是闭环特征方程的重根;
 2.
2.
 3.
3.
 4. 分离角:(2k+1)π/分支数
7. 出射角和入射角:只有复极点,复零点需要求,在实轴上的点不用求
8. 与虚轴的交点:
1. s=jw
2. 劳斯阵某一行全为 0
9. 闭环极点(特征根)之和与之积:n-m 大于等于 2 时,闭环极点之和等于开环之和
4. 分离角:(2k+1)π/分支数
7. 出射角和入射角:只有复极点,复零点需要求,在实轴上的点不用求
8. 与虚轴的交点:
1. s=jw
2. 劳斯阵某一行全为 0
9. 闭环极点(特征根)之和与之积:n-m 大于等于 2 时,闭环极点之和等于开环之和
带角的(出入射角,渐近线角)180° 等相角根轨迹比 0° 等相角根轨迹多一个 π
实轴区间那个改成偶数
步骤#
- 标注开环极点和零点,纵横坐标用相同的比例尺
- 实轴上的根轨迹
- n-m 条渐近线
- 根轨迹的出射角、入射角
- 根轨迹与虚轴的交点
- 根轨迹的分离点、会合点
- 结合根轨迹的连续性、对称性、根轨迹的支数、起始点和终点,闭环极点与闭环极点之和及之积等性质画出根轨迹
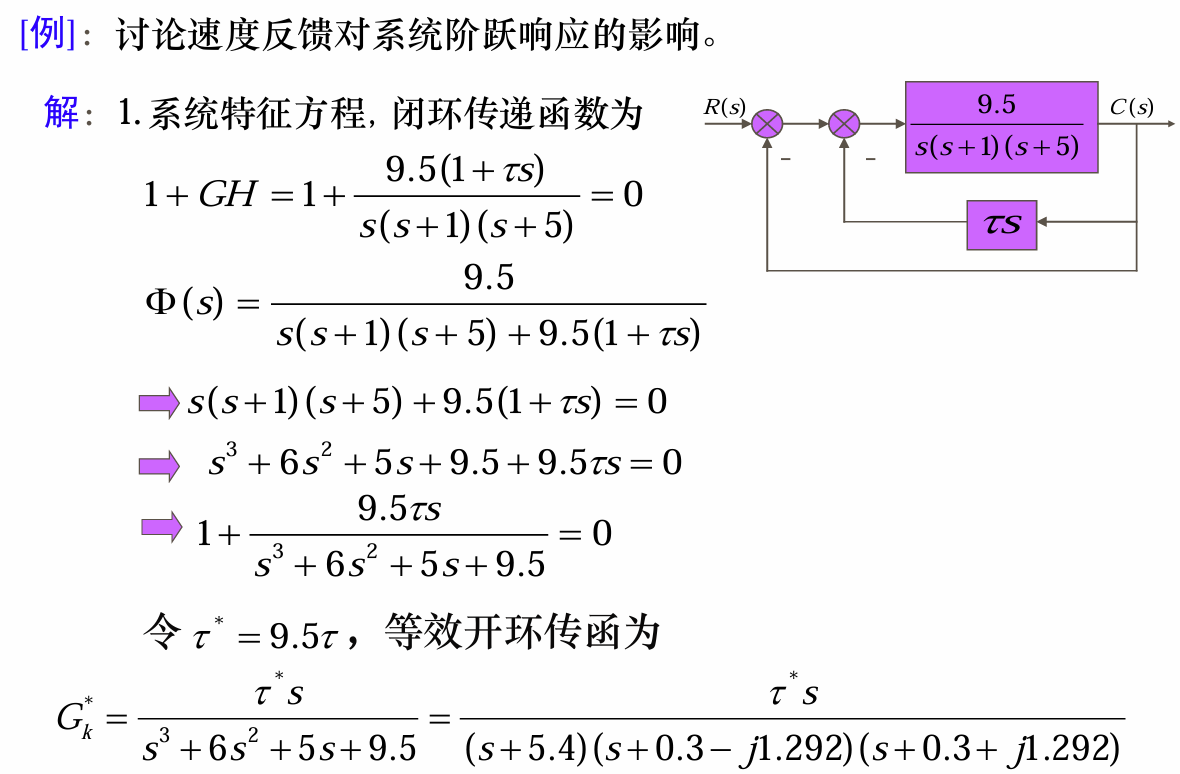
参量根轨迹#
需要绘制除Kg以外的其它参数变化时闭环系统特征方程根的轨迹,就是参量根轨迹
变形获得等效根轨迹方程方法:把特征方程写为(不含参数的多项式)+(参数和另一个多项式的乘积)
例:
特殊情况#
- 零极点对消:图像上要保留
- 正反馈:画 0° 根轨迹
- 非最小相位系统根轨迹:有时会出现正反馈的效果,也画 0° 根轨迹
在右半S平面上既无极点也无零点,同时无纯滞后环节的系统是最小相位系统,相应的传递函数称为最小相位传递函数
在右半S平面上具有极点或零点,或有纯滞后环节的系统是非最小相位系统,相应的传递函数称为非最小相位传递函数
4.3 根轨迹分析法#
增加开环零、极点对根轨迹的影响#
在原开环传递函数零极点的左边增加极点:原根轨迹向右移动,降低系统的相对稳定性,增加系统的调整时间
在原开环传递函数零极点的左边增加零点:原根轨迹向左移动,增强系统的相对稳定性,减小系统的调整时间
条件稳定系统:参数在一定范围内取值才能稳定的系统(根轨迹会跑到 s 右半平面)#
P11:使系统达到一定性能指标的参数范围(todo#
课本 p245 例 4.4.1