第 5 章 线性系统的频域分析法#
5.1 频率特性的基本概念#
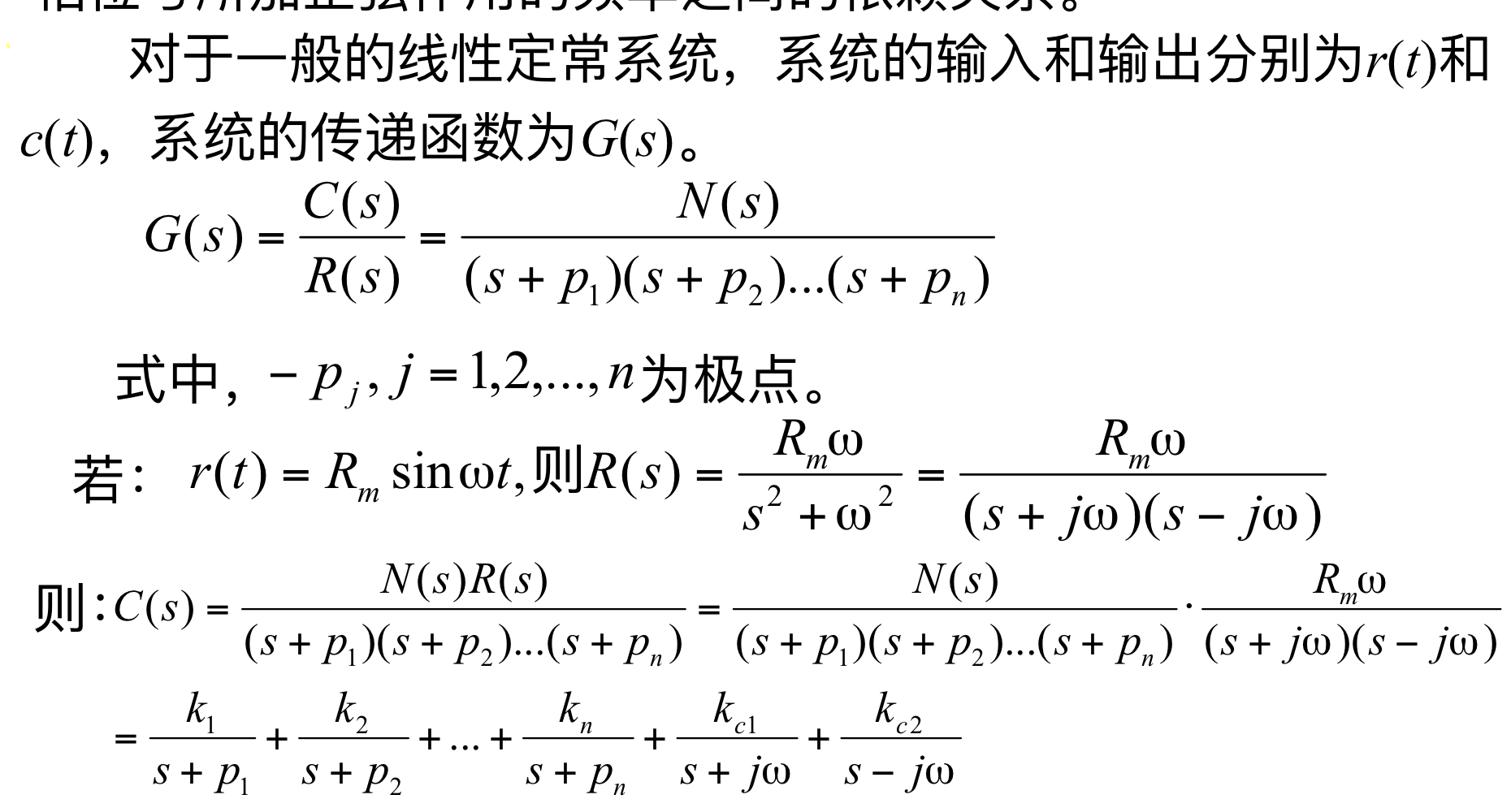
线性定常系统(LTI)对正弦输入信号的稳态响应,仍然是同频率的正弦信号,只是幅值和相位会发生变化。这种变化是频率的函数,包含了系统的全部动态信息
系统在正弦输入信号作用下的稳态响应振幅和相位与所加正弦的频率之间的关系
5.2 频率特性的对数坐标图(伯德图)#
典型环节的伯德图#
比例环节#
- 幅频:水平直线 20lgK dB
- 相频:水平直线 0° 或 -180°
- 作用:整体上下平移幅频曲线
积分环节和纯微分环节#
- 积分 1/s:
- 幅频:斜率为 -20 dB 的直线,穿过 (1,0) 点
- 相频:恒为 −90°
- 微分 s:
- 幅频:斜率为 +20 dB 的直线,穿过 (1,0) 点
- 相频:恒为 +90°
惯性环节和一阶微分环节#
- 幅频:由两条线渐近线近似
- 低频段(w<<1/T):0dB 水平线
- 高频段(w>>1/T):斜率为 -20dB 的直线
- 转折频率(w=1/T)
- 相频:从 0 度平滑过渡到 -90 度,转折频率处是 -45 度
振荡环节和二阶微分环节#
- 幅频:由两条线渐近线近似
- 低频段(w<<1/T):0dB 水平线
- 高频段(w>>1/T):斜率为 -40dB 的直线
- 转折频率(自然频率):w=wn
- 谐振现象:当阻尼比 0<ζ<0.707 时,幅频曲线会出现一个峰值 Mr,对应的频率为谐振频率 ωr=ωn(1−2ζ2)1/2
- 相频:从 0 度平滑过渡到 -180 度,转折频率处是 -90 度
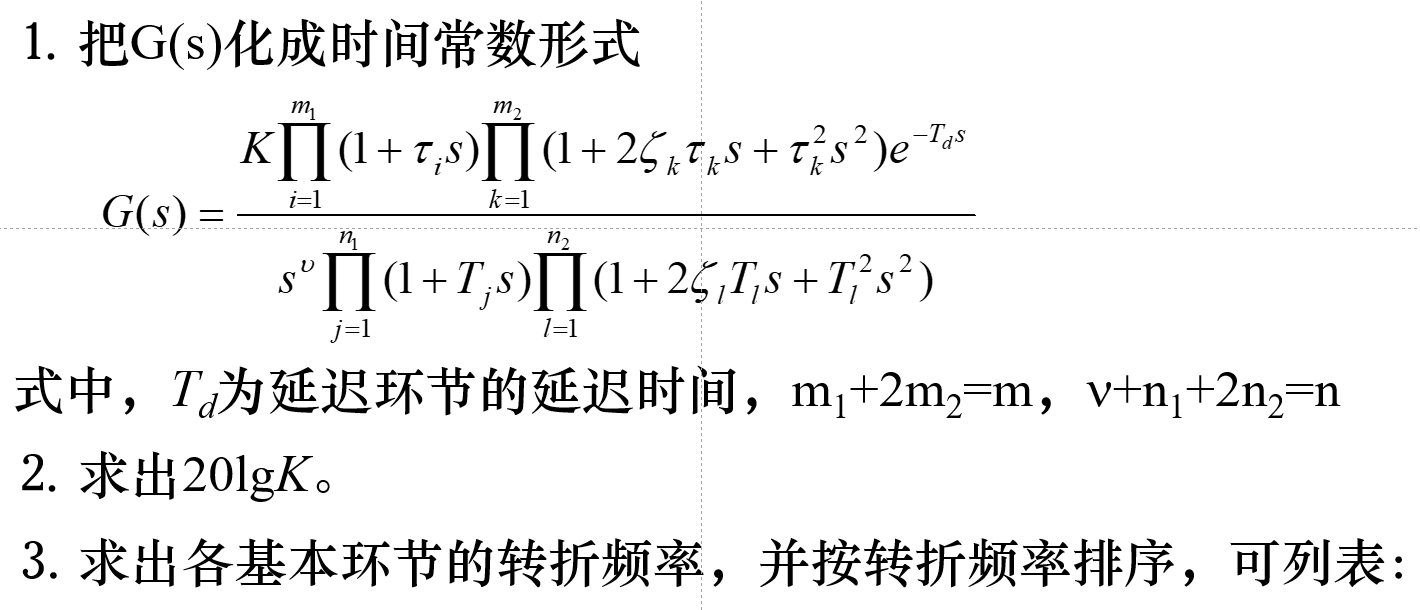
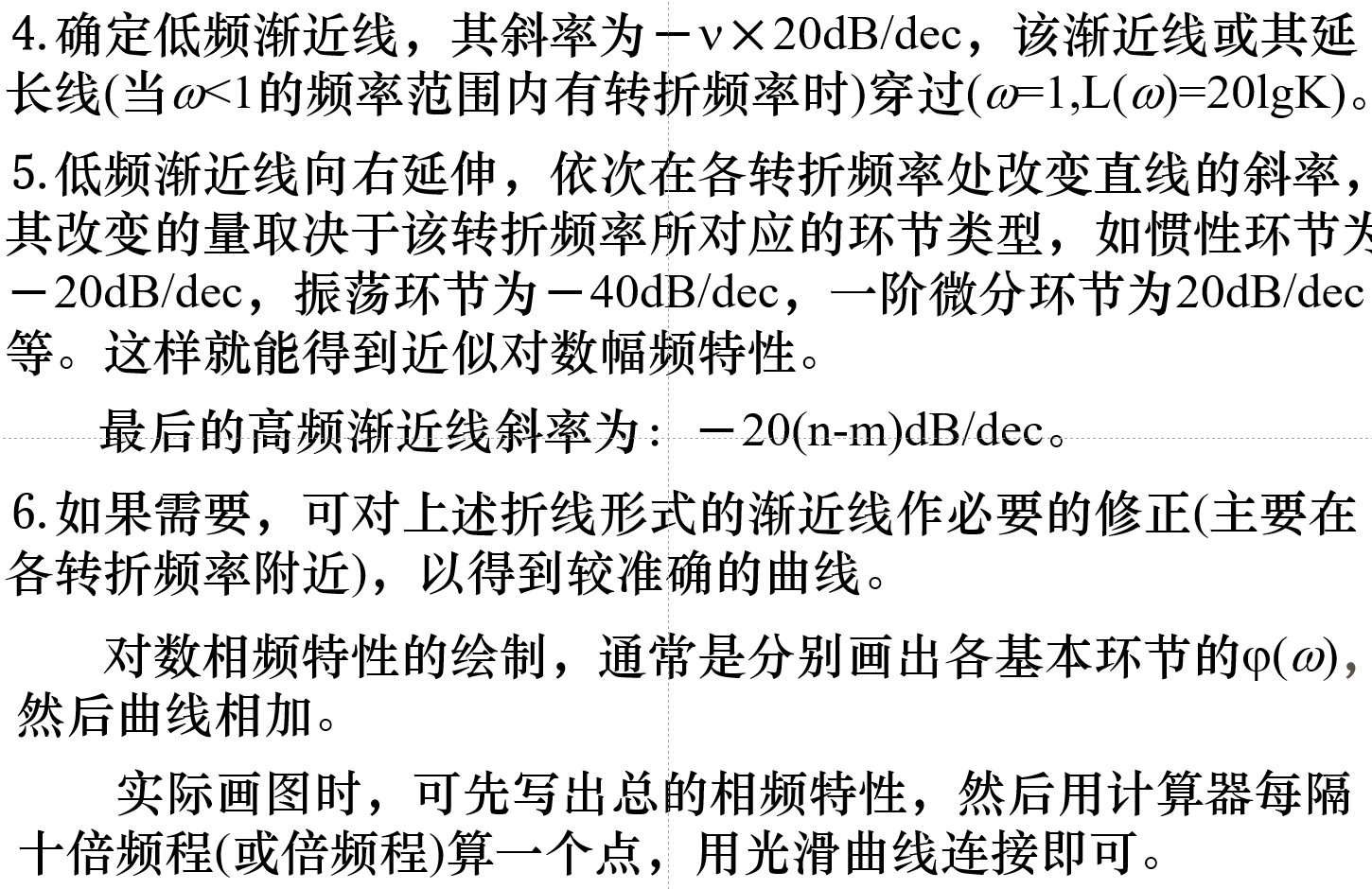
伯德图的绘制方法#
最小相位系统#
在幅频特性相同的一类系统中,最小相位系统的相位移最小(相角变化范围最小),并且最小相位系统的幅频特性的斜率和相频特性的角度之间具有内在的关系
幅频特性的斜率增加或者减少时,相频特性的角度也随之增加或者减少
从伯德图中获取的系统信息#
- 系统型别 与静态误差系数:
- 低频段 的斜率反映了系统型别
- 低频段渐近线(或其延长线)在 处的高度 ,可求出开环增益 ,进而求出静态位置/速度误差系数
- 截止频率 与带宽:
- 幅频曲线穿越 0 dB 线所对应的频率即截止频率
- 直接反映了系统的响应速度。 越大,系统响应越快。
- 稳定裕度:
- 相位裕度 :在 处,从相频曲线上读取该点的相位值 ,则
- :系统稳定(通常要求
- 越大,系统阻尼越大,超调越小
- 幅值裕度 (或 ):在相频曲线穿越 的频率 (相位穿越频率)处,从幅频曲线上读取该点的幅值 ,则 dB
- dB:系统稳定(通常要求 dB)
- 越大,系统在增益变化时保持稳定的能力越强
- 相位裕度 :在 处,从相频曲线上读取该点的相位值 ,则
- 滤波特性与抗噪性:
- 高频段的下降斜率反映了系统抑制高频噪声的能力。斜率越负,抗高频干扰能力越强
5.3 频率特性的极坐标图(奈奎斯特图)#
典型环节的极坐标图 P290#
比例环节#
K
积分环节/微分环节#
虚轴
惯性环节#
K 半圆到 0
振荡环节#
1 到 0
延迟环节#
1 开始单位圆
增加零极点对图的影响#
增加极点(惯性环节)#

增加原点处的极点(积分环节)#

绘制奈奎斯特图的一般思路#
- 写出开环频率特性:
- 确定关键点:
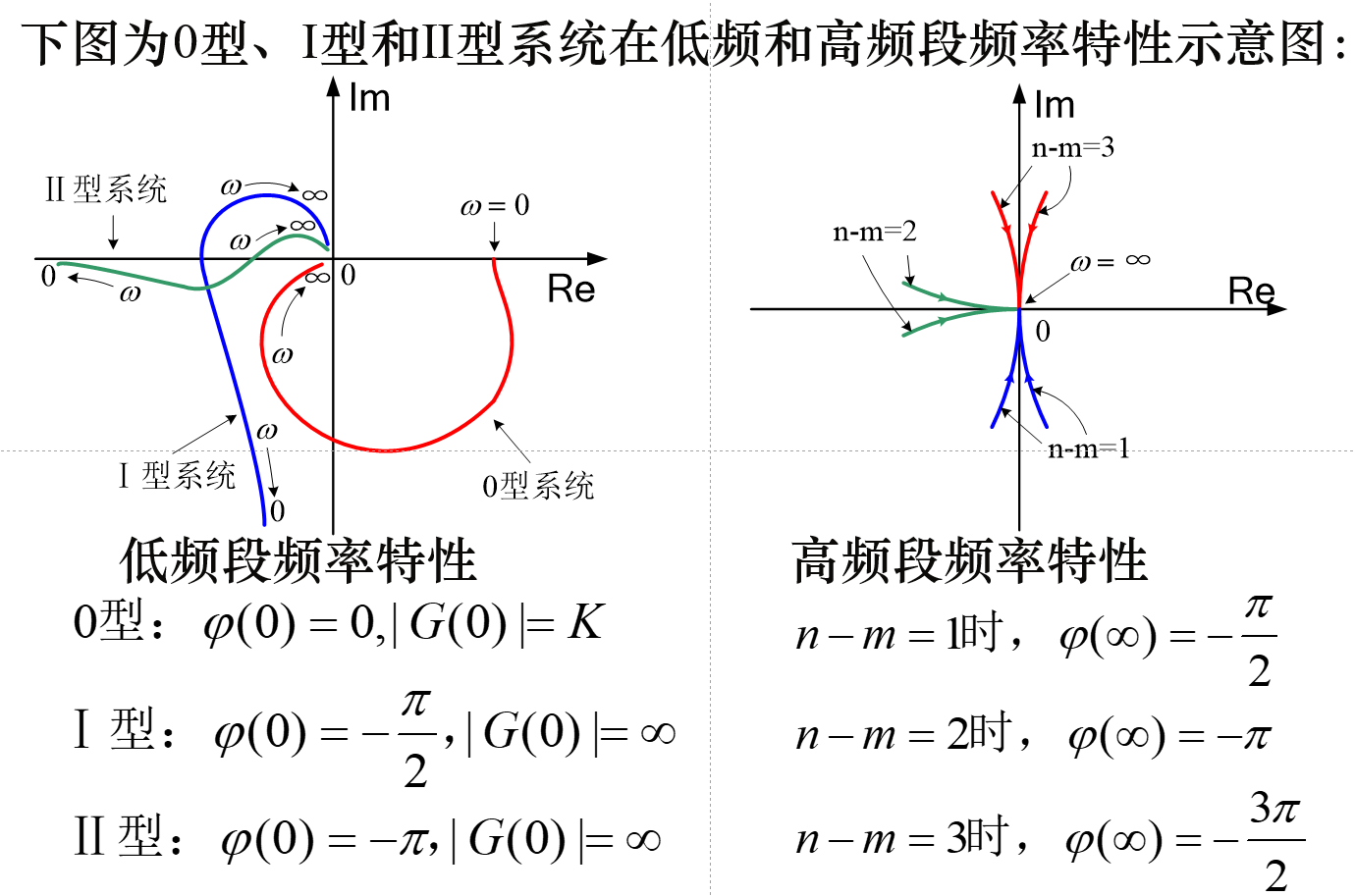
- 起点 ():
- 由系统型别 v(积分环节个数)和开环增益 (K) 决定。
- (v=0) (0型系统):起点为正实轴上的点 ((K, j0))。
- (v=1) (I型系统):幅值趋于无穷大,相位趋于 (),即从负虚轴无穷远处开始。
- (v=2) (II型系统):幅值趋于无穷大,相位趋于 (),即从负实轴无穷远处开始。
- 终点:
- 由分子分母阶次差决定。对于物理可实现系统,终点总是趋于原点,并以角度趋近于原点(其中 (n) 为分母阶次,(m) 为分子阶次)。
- 与实轴/虚轴的交点:
- 令解出,代入,得到与实轴的交点。
- 令解出,代入,得到与虚轴的交点。这些交点对于稳定性分析至关重要。
- 起点 ():
- 大致描绘轨迹:根据起点、终点、交点以及典型环节的组合趋势,光滑地连接出轨迹。
5.4 奈奎斯特稳定判据#
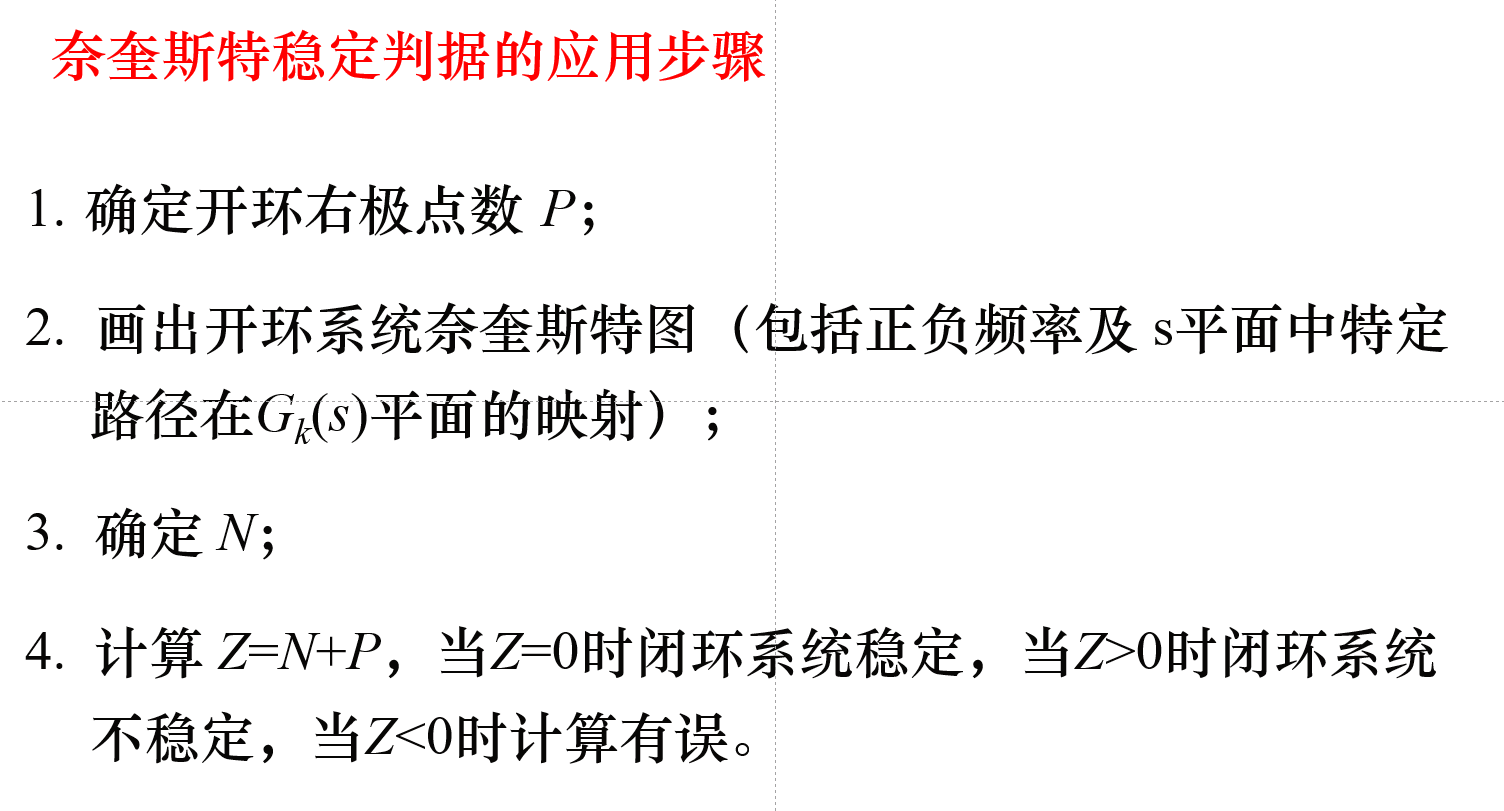
N 怎么数:顺时针穿越 (-1,0) 左侧实轴的次数减去逆时针穿越 (-1,0) 左侧实轴的次数
5.5 稳定裕度#
幅值穿越频率 wc
相角穿越频率 wg
幅值裕度 Lg
相位裕度 γ
近似计算
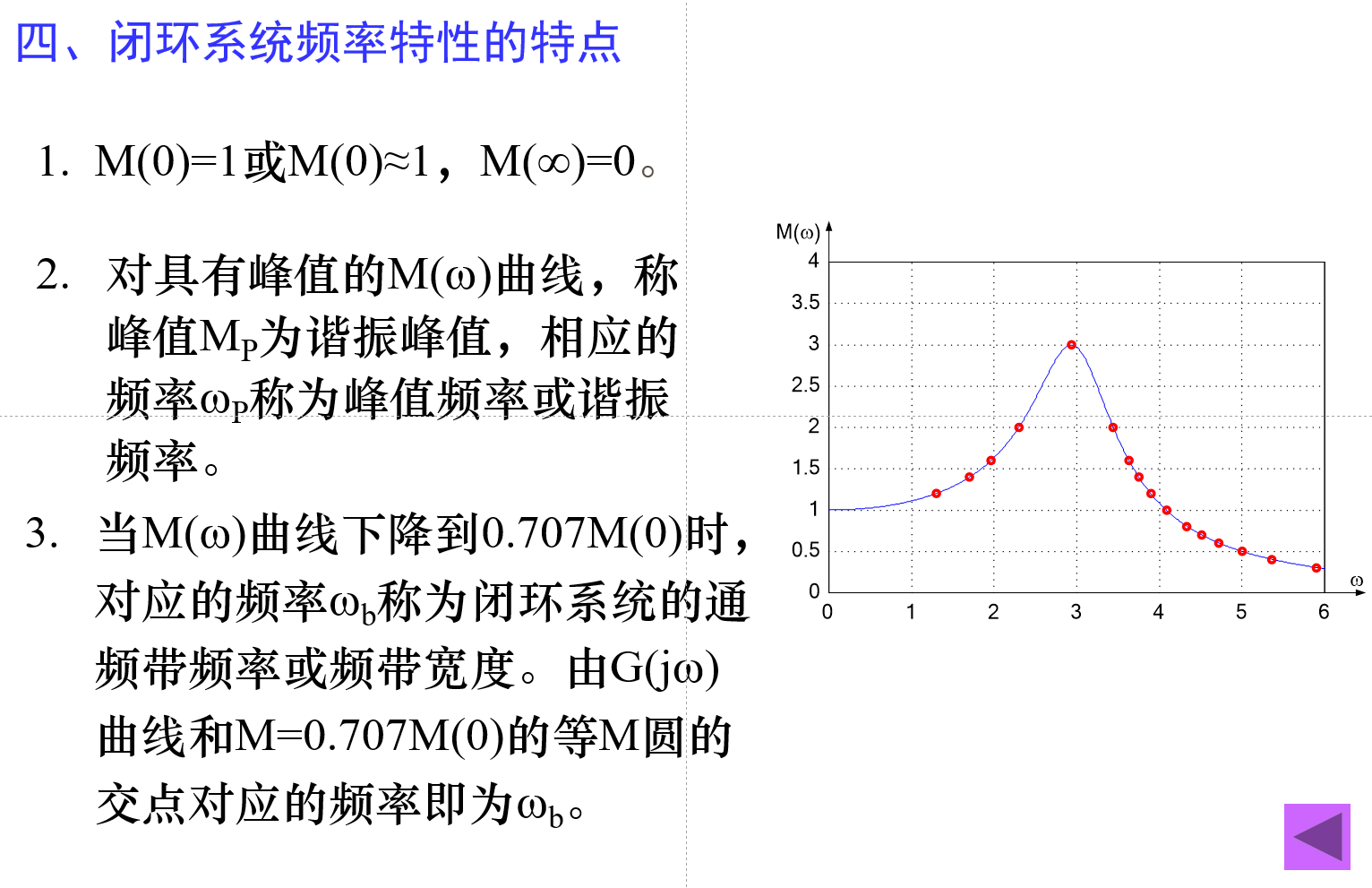
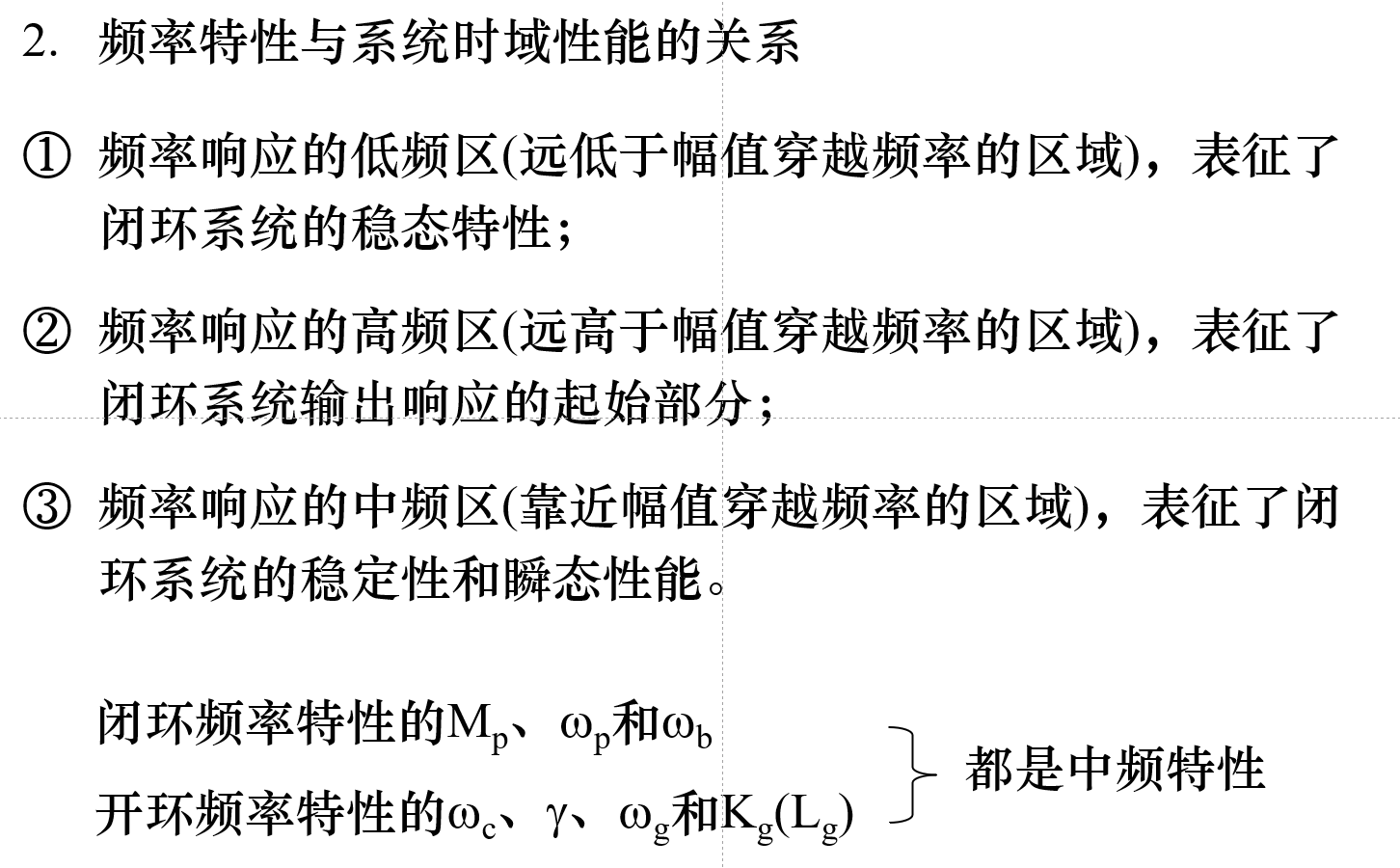
5.6 闭环系统性能分析#